
16 Week Project
Hochschule für Gestaltung: Bachelor Thesis Project Collaboration Partner: Fraunhofer Institute IPA, Stuttgart, Germany Mentors: Matthias Held, Nici Reichert, Simon Baumgarten
My Role
This bachelor thesis was a one person project. Therefore I was part of every step of the design process except the final model was sponsored by the Fraunhofer Institute and built by a professional model builder.
News
A first prototype has been built by the Fraunhofer Institute IPA and is currently in use for further user testing


How can we lighten the workload of the nurses and at the same time raise the independence and life quality of the residents in nursing homes?
Challenge
I contacted the Fraunhofer IPA in Stuttgart with the great interest in doing a cooperation in the field of robotics in the medical sector.
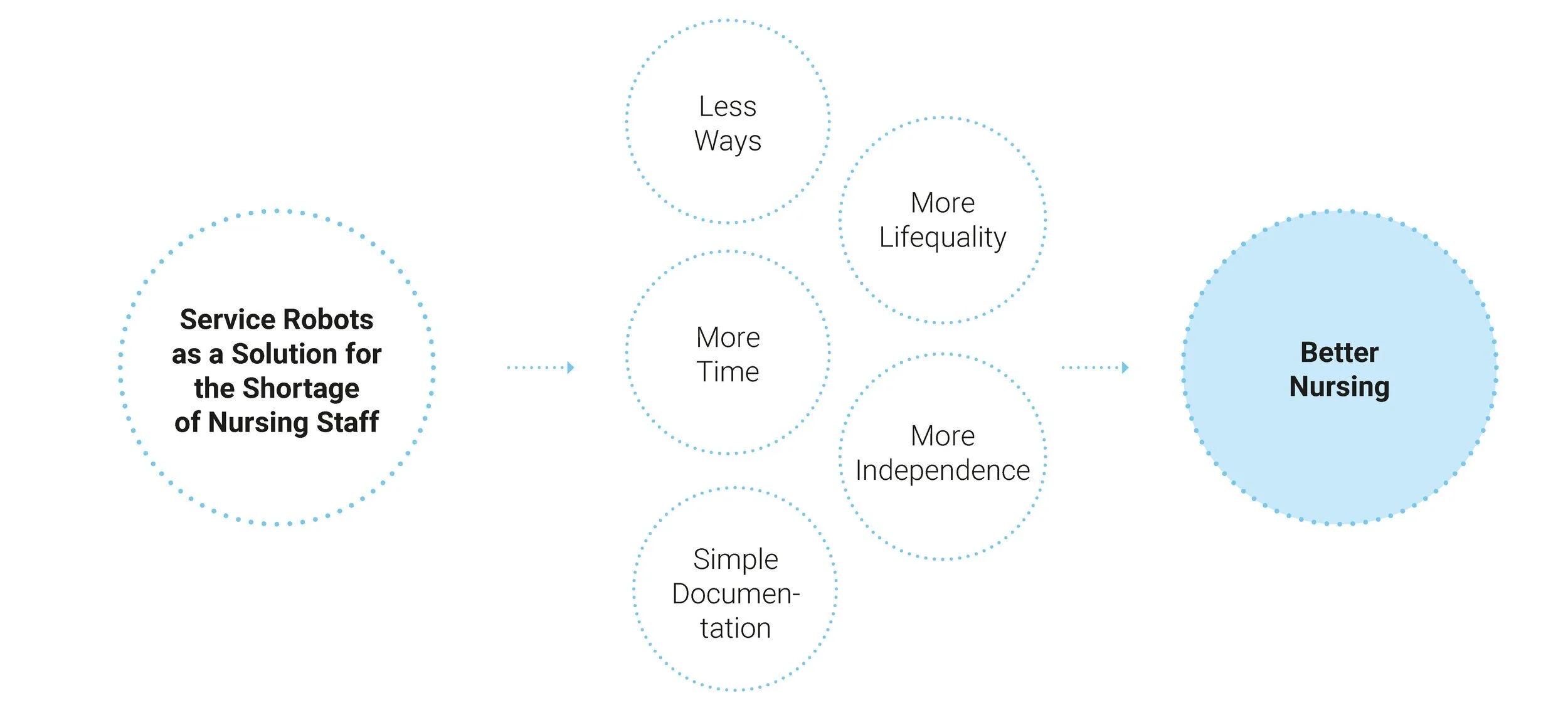
Dr. Birgit Graf, group leader of the personal and domestic robotics group at the Fraunhofer IPA, Stuttgart, Germany approached me with the proposal to design a service assistant for residents and staff in nursing homes to lighten the workload of nurses and provide a better care. The aim was to provide a support for all the non-nursing activities, such as support during meal times, regular drinking and eating and the delivery of other requested objects, to reduce ways and save time in order to gain more time for actual nursing tasks.

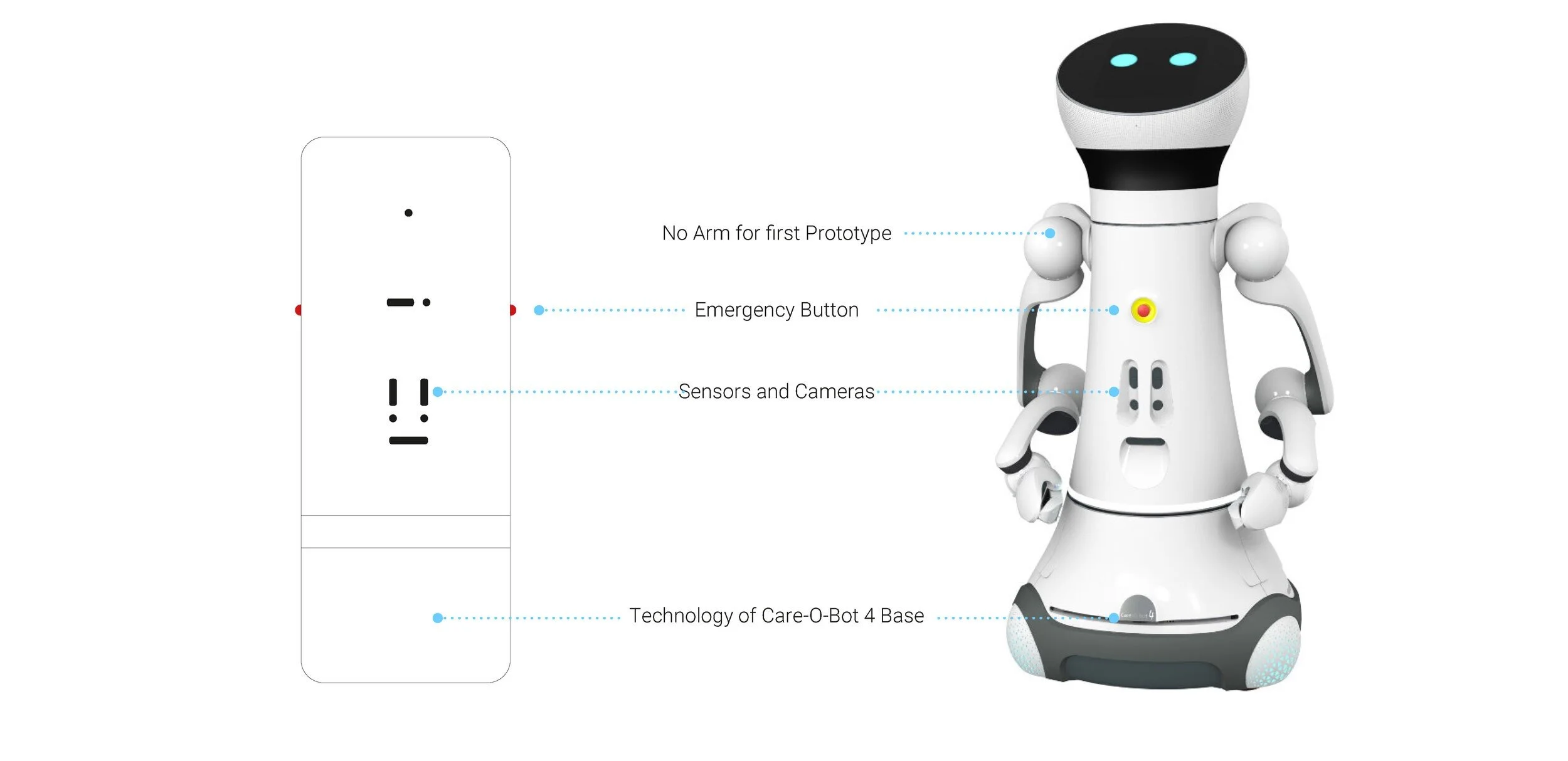
From a technology perspective the challenge and task given by the Fraunhofer IPA was to build on the Technology of the Care-O-Bot 4 base (see project) as well as to use the same sensors, in order to save money when building a prototype of my results. Care-O-Bot 4 is a Service Robot designed by the design Agency Phoenix Design for the Fraunhofer IPA Institute.
Background
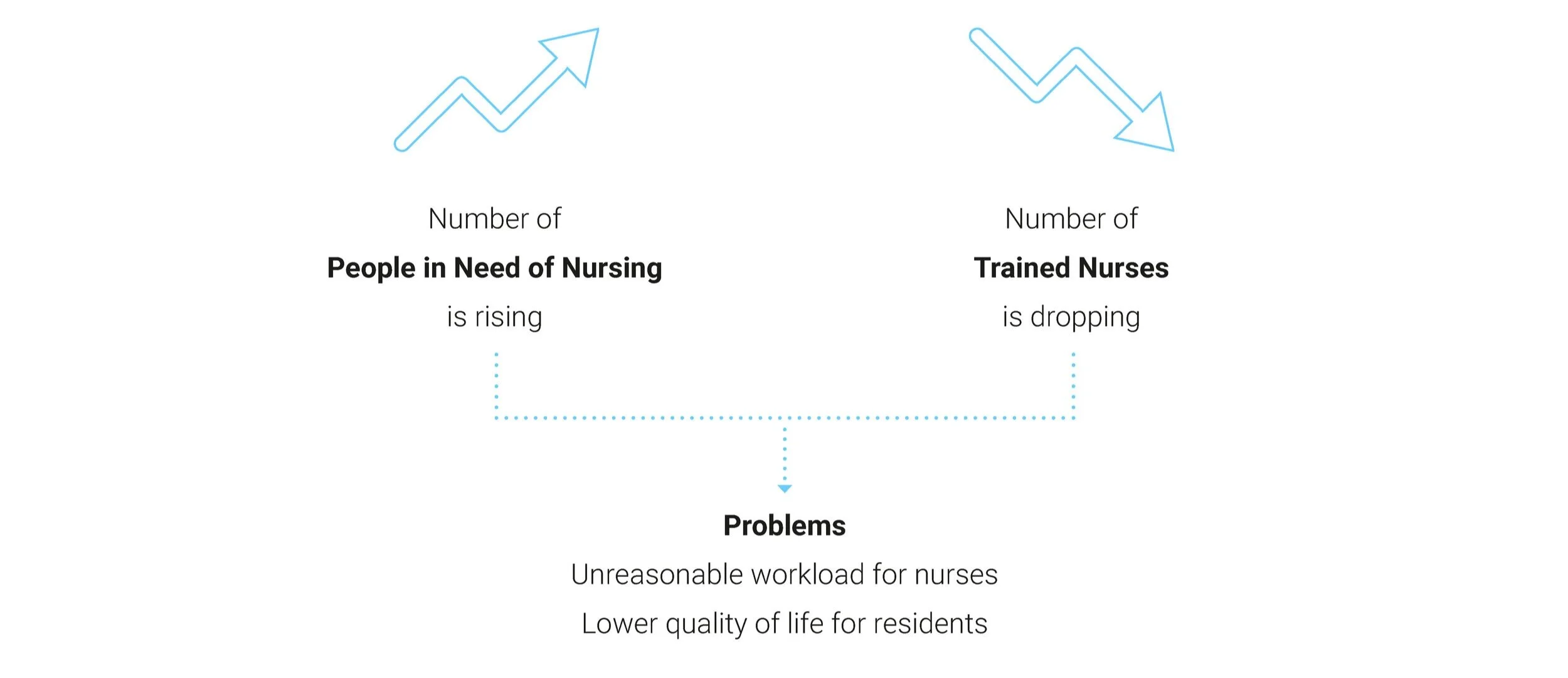
The care industry is especially affected by the demographic change, both in hospitals and nursing homes: While the number of people in need of care is rising drastically, there are less and less young people, who decide to learn a nursing job. At the same time there are a lot of older nurses that are forced to go into early retirement due to the physical and mental burden they are exposed to in their everyday work environment. According to a study of the German magazine „Spiegel“, „Which jobs make sick?“ nurses are an average of 25 days a year sick, which is the third highest number within all tested job fields. I, as well as the Fraunhofer Institute, believe, that service robotic has the potential to reduce the workload. Here we have to differentiate between different kinds of lightening the workload: On one hand you can lighten the physical workload by saving walking ways or improving current tools to be more efficient and ergonomic. On the other hand you can lighten the stress by saving time in areas such as non-nursing tasks and therefore gaining more time for the actual nursing tasks.
Robots vs. Humans or better Robots assisting Humans
When starting the thesis I was very critical and uncertain of what my stance towards robotics was, especially when they seemingly in the eyes of many people “replace” the human and take away their jobs. But I wanted to take a closer look and see it as a 4 months challenge during which I had a chance to dig deeper into the topic and form a better picture and overview myself.
For this particular project setting I also asked myself: What makes a good nurse?
During my research it showed, that the following aspects are part of what being a good nurse is all about: Empathy, Attention to Detail, Understanding, Interpersonal Skills, Compassion, Care but most of all Interpersonal Relations and Emotions.
But my research and observation in the nursing home had shown that due to the rising number of people in need of nursing and the dropping numbers of available educated and healthy nurses there was literally no time for a lot of these qualities. Most of the nurses I met, where caring, empathetic and compassionate but the exhaustion and pressure was written in their eyes. They have so many tasks, which are unrelated to Human to Human contact such as documentation in their office, other bureaucracy, cleaning, medication or meal preparation and other kitchen related tasks. Knowing that all of this time taking care of those tasks would be taken off the time spend on actually nursing tasks close to the elderly people, where time, empathy, attention to detail and care is the key.
“Ich habe den Beruf der Altenpflegerin nicht gelernt, um den ganzen Tag in der Küche zu stehen, sondern um pflegebedürftige Menschen zu pflegen.” - interviewed nurse wants to stay anonymous
(translation: “I did not study to be a nurse at a nursing home, to spend all day in the kitchen, but to take care of people in need of nursing.” - interviewed nurse wants to stay anonymous)
Having seen this I saw a strong reasoning on why robotics could be part of the solution to resolve the current situation at nursing homes. And assisting the nurses instead of replacing them, in tasks that are lower on the priority list of a good care in these homes.
For me it was important to create something that I could ethically support. And I want to emphasise that I don’t see my final result as a care robot but as a service robot that does not take over the care or any nursing tasks where the human and interpersonal relations are irreplaceable, but serves and supports in small everyday tasks around the nursing home.
Two parties
Target group are on one hand the nurses, which will be supported by the service assistant and on the other hand the inhabitants of the nursing home, who the service assistant will mainly interact with and serve.
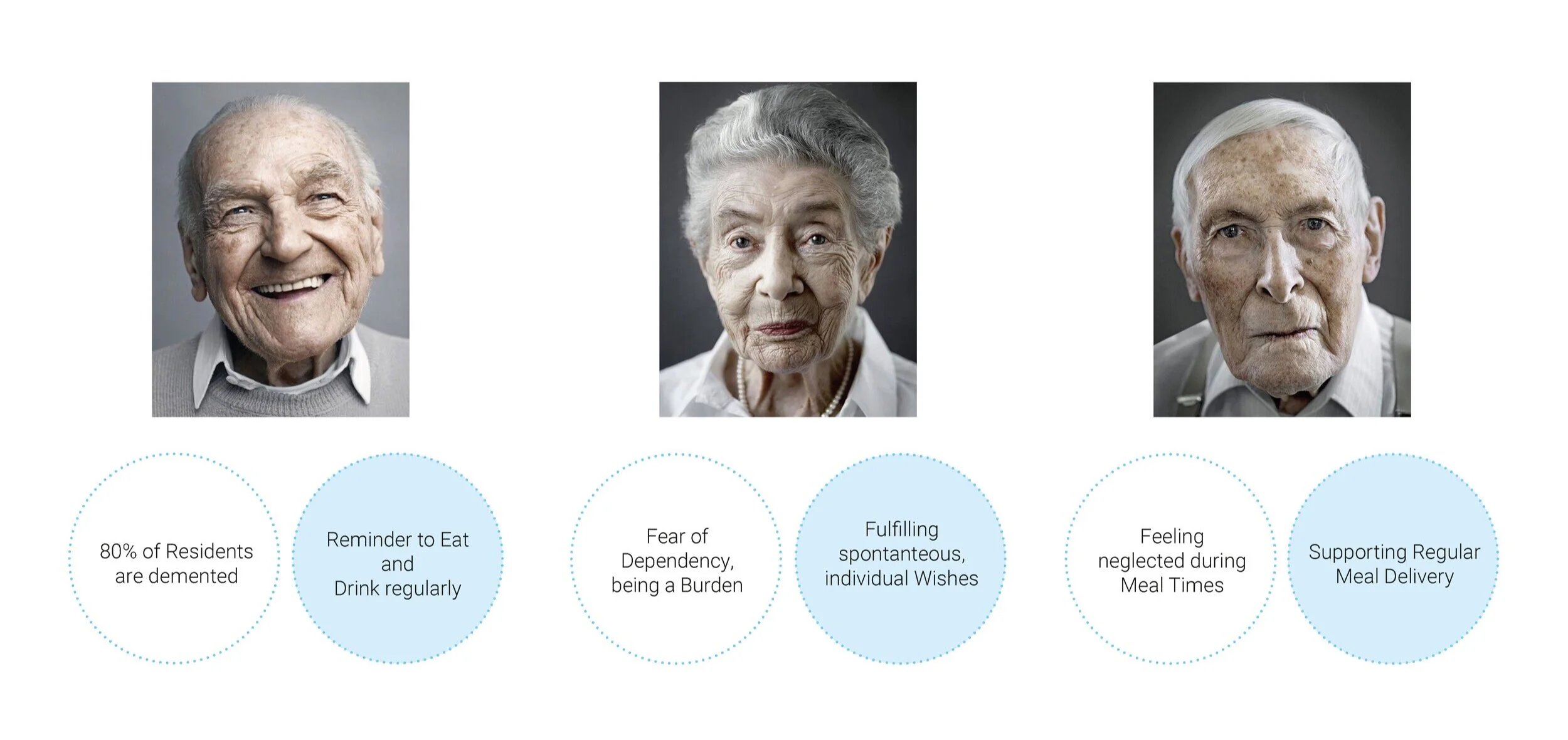
Nurses - Problems and user needs
Elderly residents - Problems and user needs

Guiding questions
To have some guidance during the project I decided to set 3 questions as a challenge for myself to solve.
How can we raise the life quality of the inhabitants?
How can we lighten the workload of the nurses?
How can we raise the independence of the inhabitants?
When do elderly people accept technology

Having interviewed and observed elderly people I realised the easiest way for them to accept technology is if they see a great benefit, in this for them absolutely strange and unknown technology. The don’t want to be overwhelmed by the usability and need user interactions that are as easy to understand and reliable as possible. Even if some of the residents in the nursing home may not have been in the best mindset anymore, especially their relatives want the best health for their loved ones and if that means that more technology is involved it is therefore more accepted if they see better results, an equal or increase in the state of wellbeing.
One things I remember from talking to one of the residents is that some of them are sadly aware of the stress the nurses are in. The elderly person explained that they sometimes do not even bother to call a nurse if they want a drink or snack because either they feel like they bother even more, no one will come anytime soon anyway or if someone comes they feel like they just cause more trouble and more of a burden for the nurses who have to run around anyway. This was a shocking insight and also showed me how much the dependency on the nurses rules even the most simplest needs, such as a glass of water. Knowing from my own parties of grandparents I remember that one of the most important things to them was, that they were independent as long as possible and I wanted to try and give the elderly a piece of freedom and independence back.
The final result
Ben - The Future of Nursing: A Service Assistant for Nursing Homes

Due to the demographic change, the nursing sector is facing a great challenge. As the number of people in need of care increases, fewer and fewer young professionals decide to work as nurses in nursing homes. As a result, the age of currently employed nurses continues to rise and many of them are forced to take early retirement. The reason for this is too much mental and physical stress in their everyday working life.
To counteract these problems, new, innovative solutions can make their everyday work easier and better. The use of service robots can save ways and time for the nursing staff and increase the quality of life as well as the independence of the nursing home residents.
In the context of this thesis, the focus is on support in regular, non-nursing activities by the service robot Ben. These non-nursing activities include tasks such as regular drinks and snacks serving, meeting special requests and assisting with the delivery of meals to the tables in the shared lounge area.
In addition, Ben uses facial recognition to regularly document how many drinks and snacks are served per person and then hopefully also consumed by the residents.
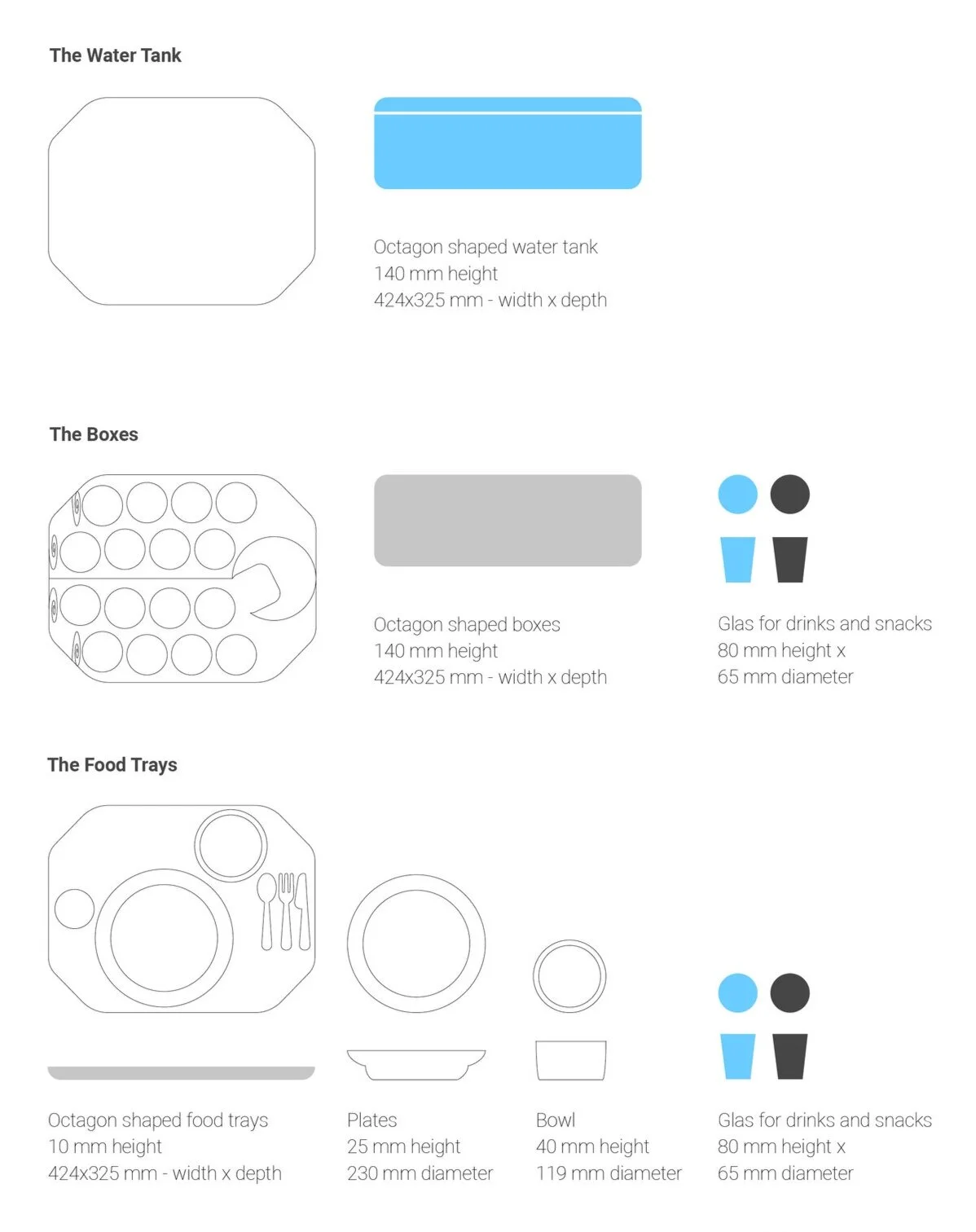
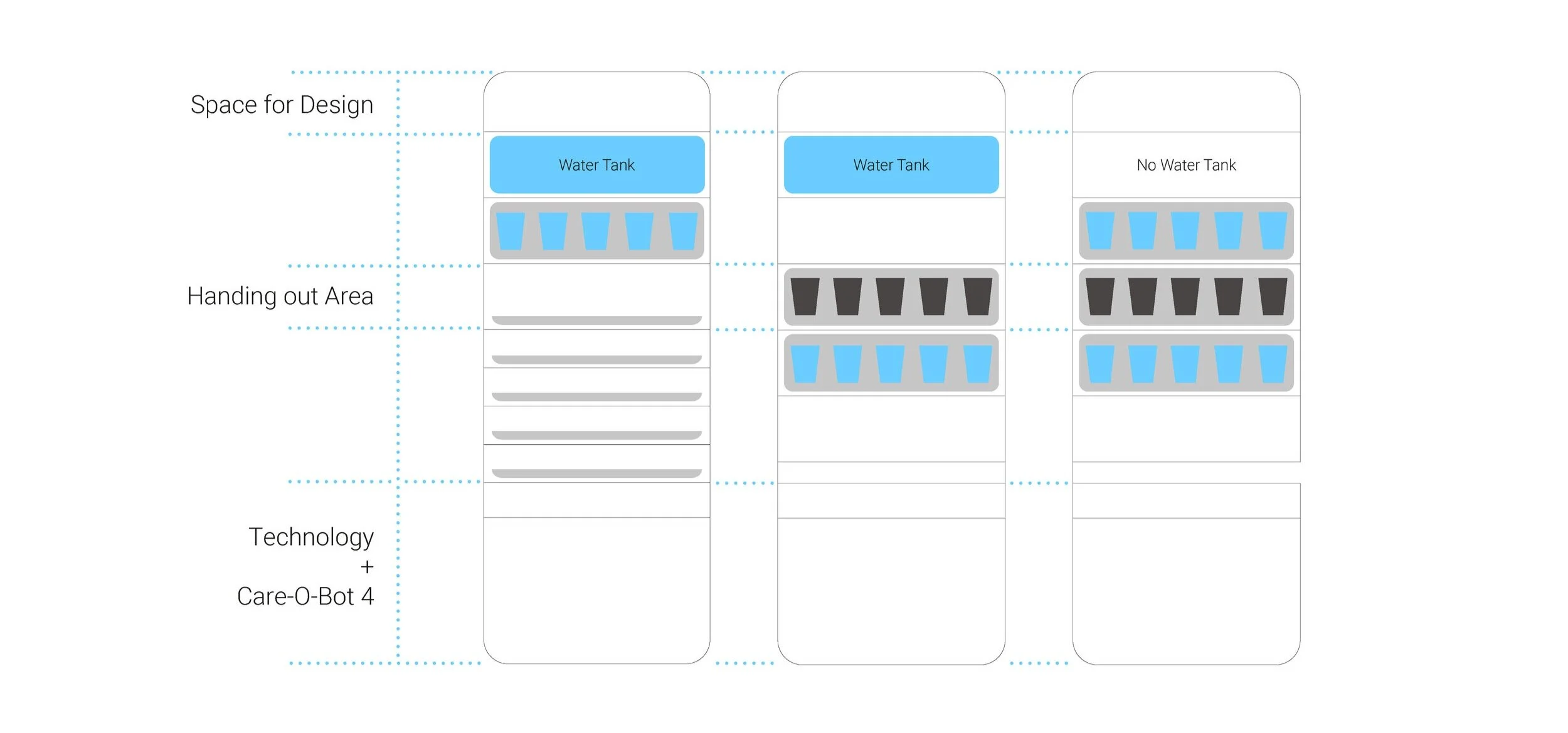
For the different scenarios, the service assistant can be loaded accordingly. The uppermost area is always the refillable 20 liter water tank. Underneath you can either use up to 5 food trays or 2 boxes, which serve snacks and drinks.
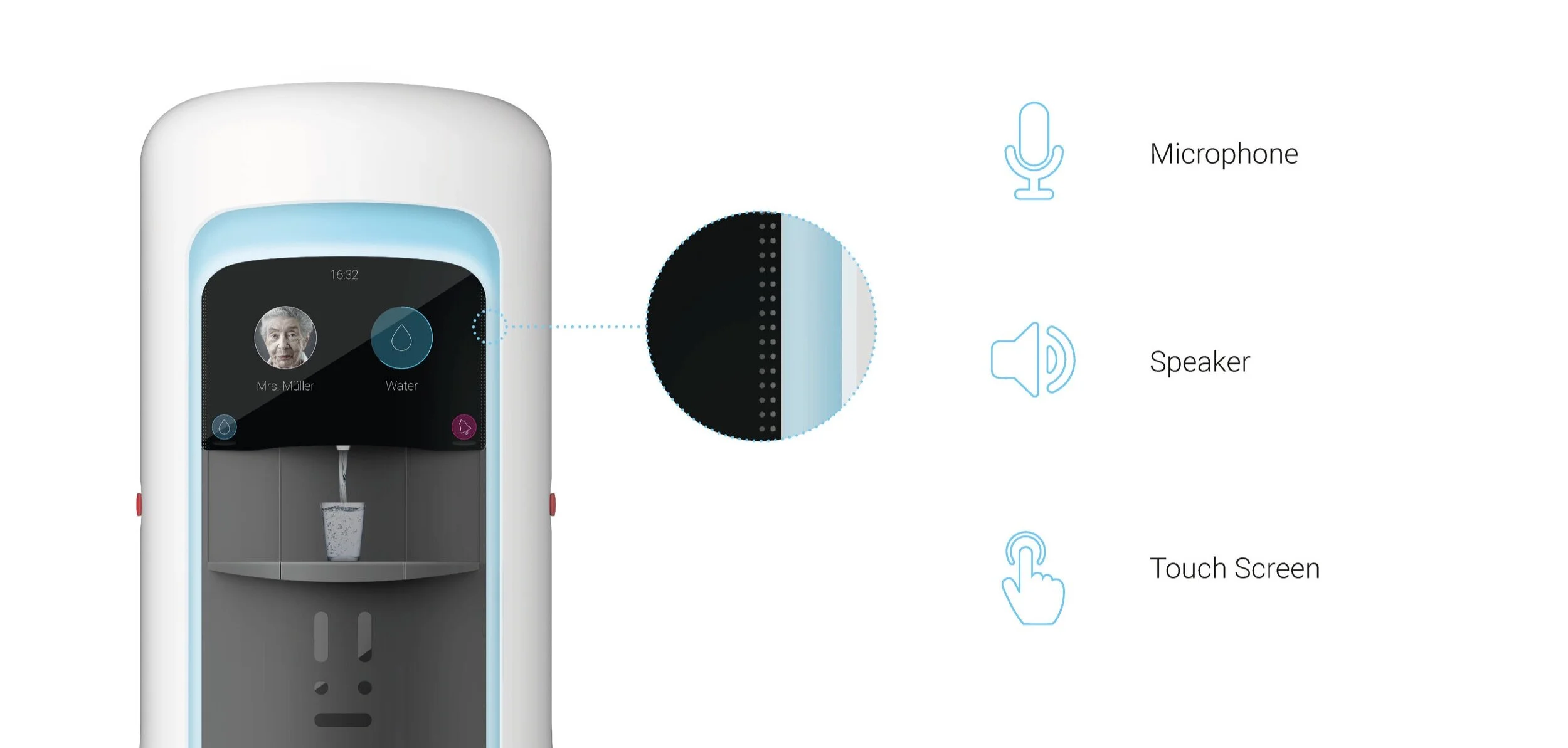
Ben is equipped with an already existing technology in the base, various sensors, speakers, microphones, voice control and a touch screen. These features, allow for individual interaction, can perform regular tasks, and thus cover and support in some of the non-care needs of residents and staff.
In addition to optimising the current nursing home life and workflow, Ben might also help to make the job branch of becoming a nurse attractive for young professionals again.

Features and details
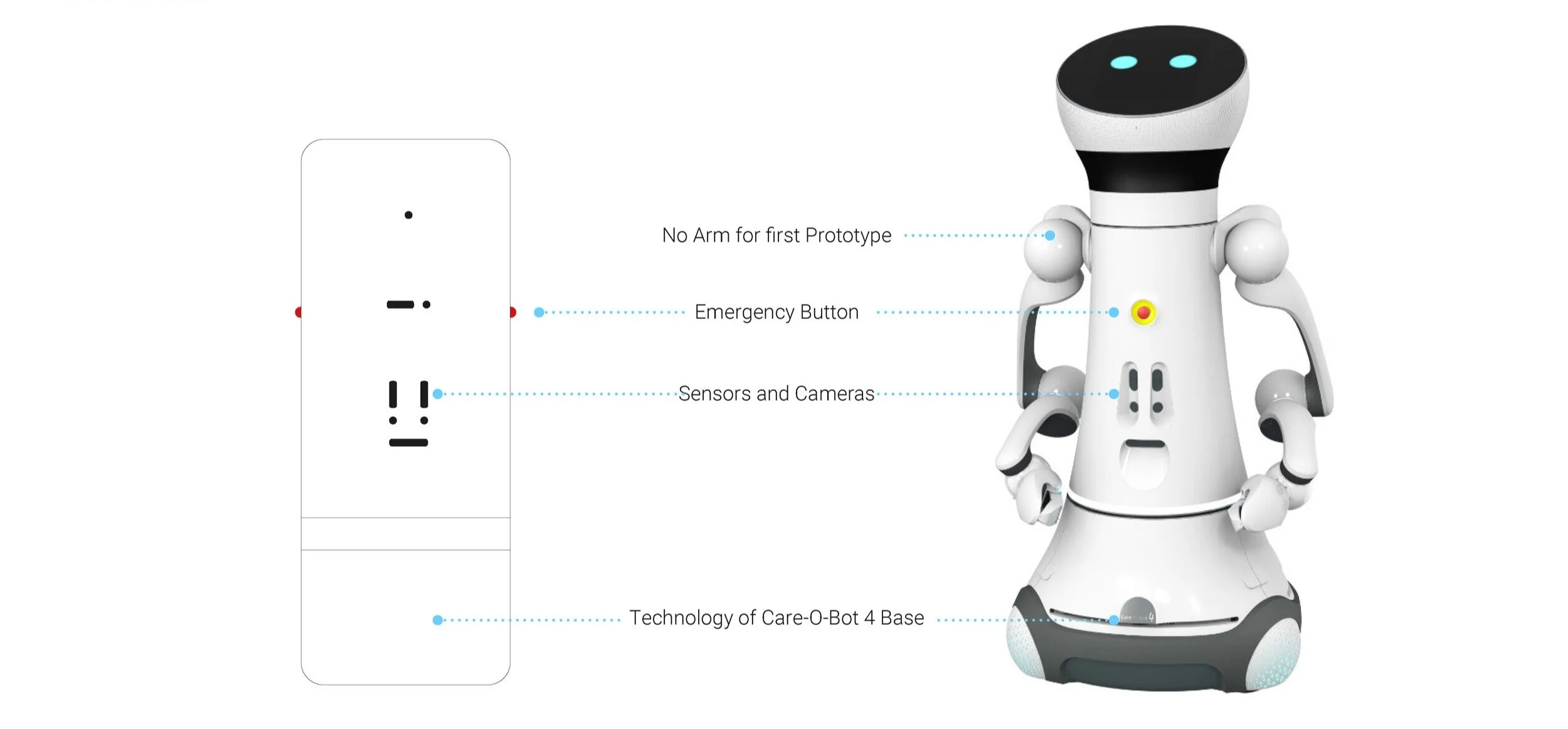
Starting with the Security Aspects, Ben has two emergency buttons one on its right and one on its left side, and several integrated 3D sensors, to help with the navigation, recognition of people, objects and obstacles. As I have learned during my research it was at the point of time of my thesis not safe enough to equip a service robot with one or multiple arms due to safety reasons around people especially in nursing homes. Additionally much more sensors would have to be installed to surveil the coordination and movements of the arm(s). I saw this aspect as a challenge and tried to create user scenarios that would work without having an arm as a tool, which of course would have possibly made tasks such as handing things much easier and user friendlier.
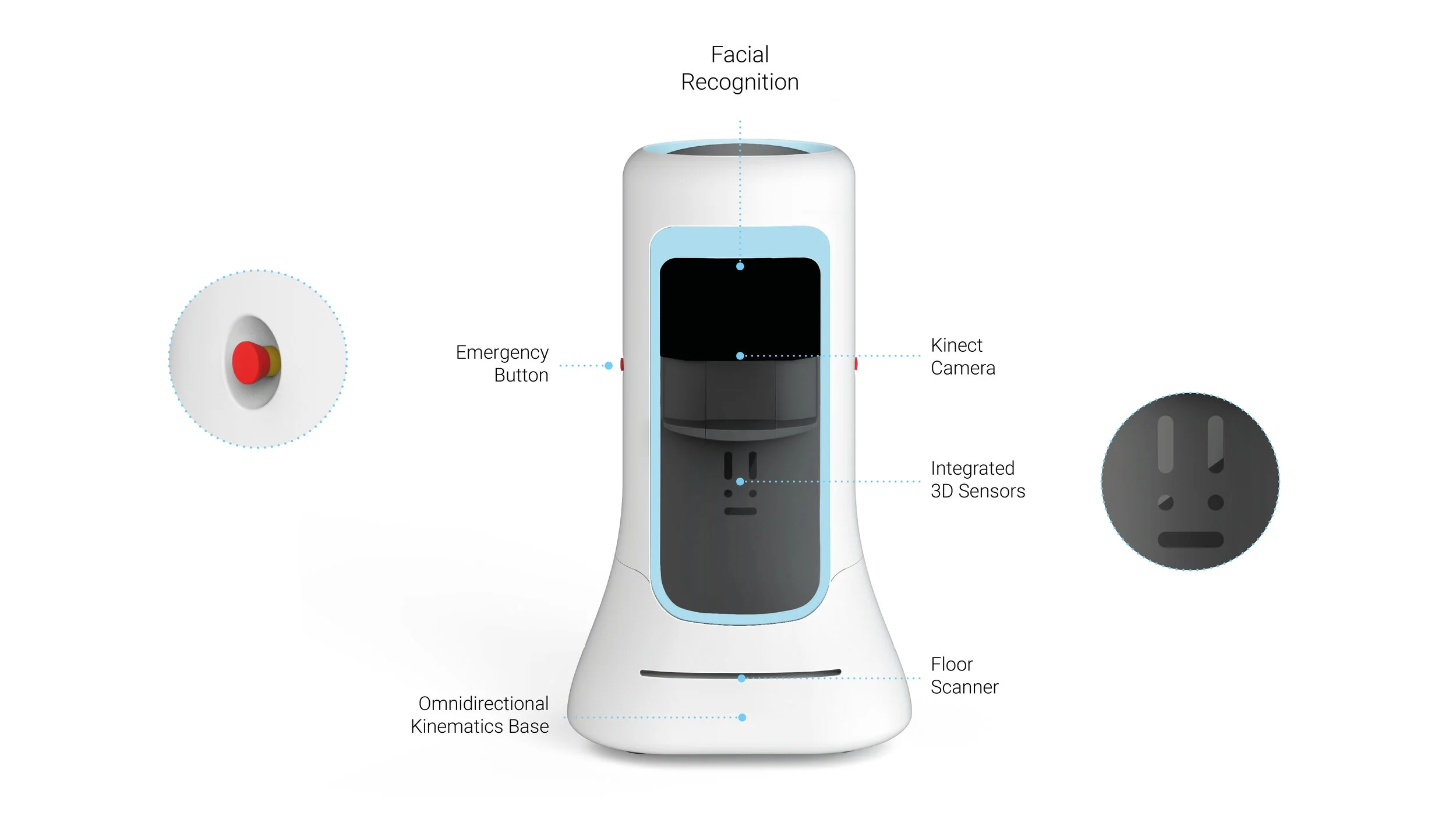
For the interaction with Ben I have implemented a Microphone and Speakers which are integrated in the screen area, all other interactions are either done by voice control or through the touch screen. The user also gets feedback if Ben is currently active or if there is an emergency/ defect through a white or red light which runs around the dark front in the blue frame.

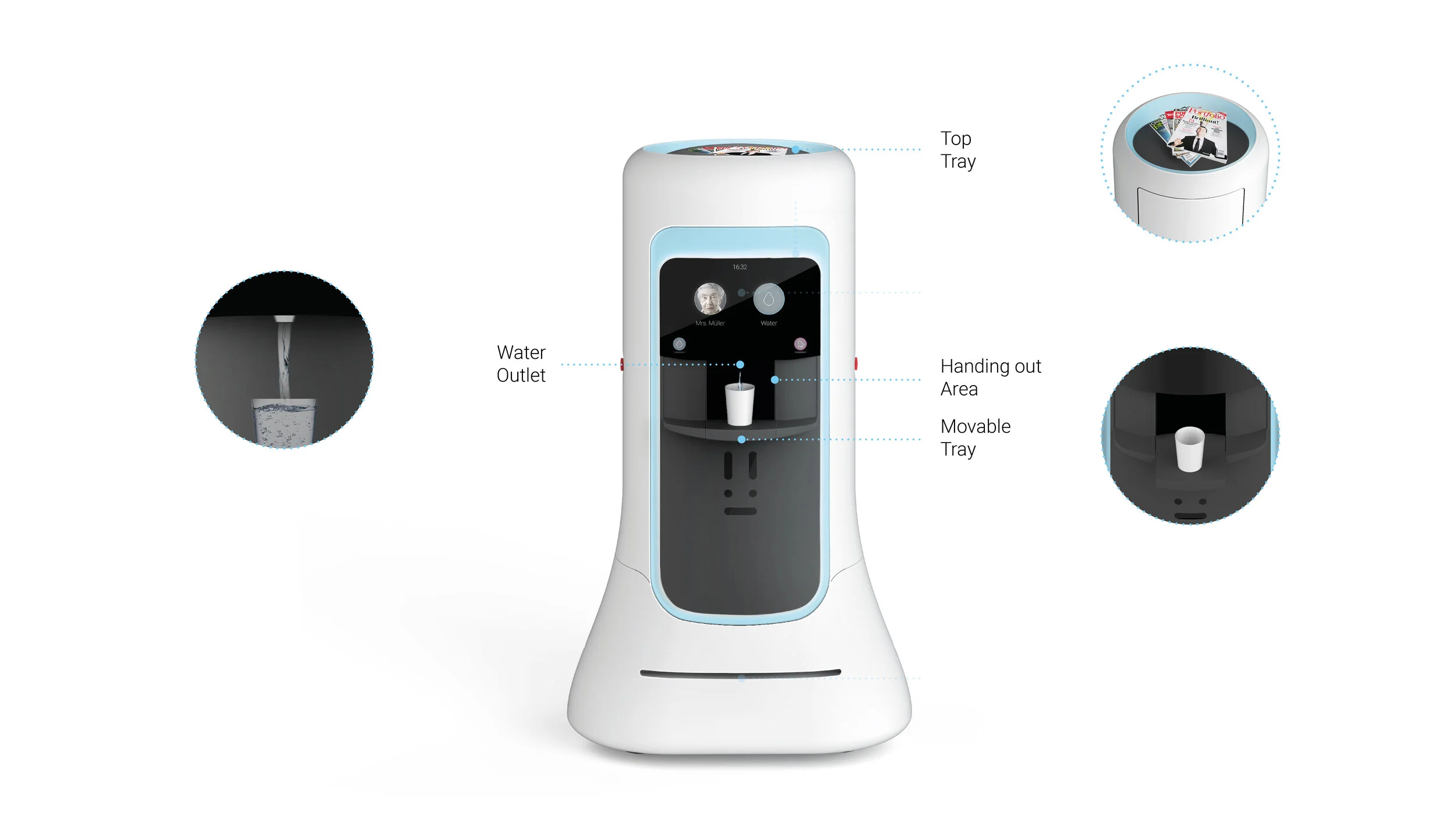
Ben is equipped with a water tank and therefore a water outlet on its front, a handing out area with a movable tray that hands the served drinks or meals closer to the person. The handing out area is only open when something is served from the inside of the service assistant, otherwise a glass of water can also be placed under the water outlet if the front is closed.
Finally on top of Ben there is a top tray, which can be either filled with magazines, or dirty dishes or glasses that need to be returned to the kitchen.
If Ben is on the go, the back is of course closed. To show how the service assistant can be equipped and loaded from left to right:
1) Either the top is loaded with a 20L water tank, a box full of drinks/snacks or desserts, and 5 food trays
2) or the top is loaded with a 20L water tank and two boxes full of drinks or snacks
3) or the water tank is removed and therefore 3 boxes full of drinks and snacks can be loaded.

The 20L water tank
Can fill an already existing water glass through the water outlet without the front having to open.
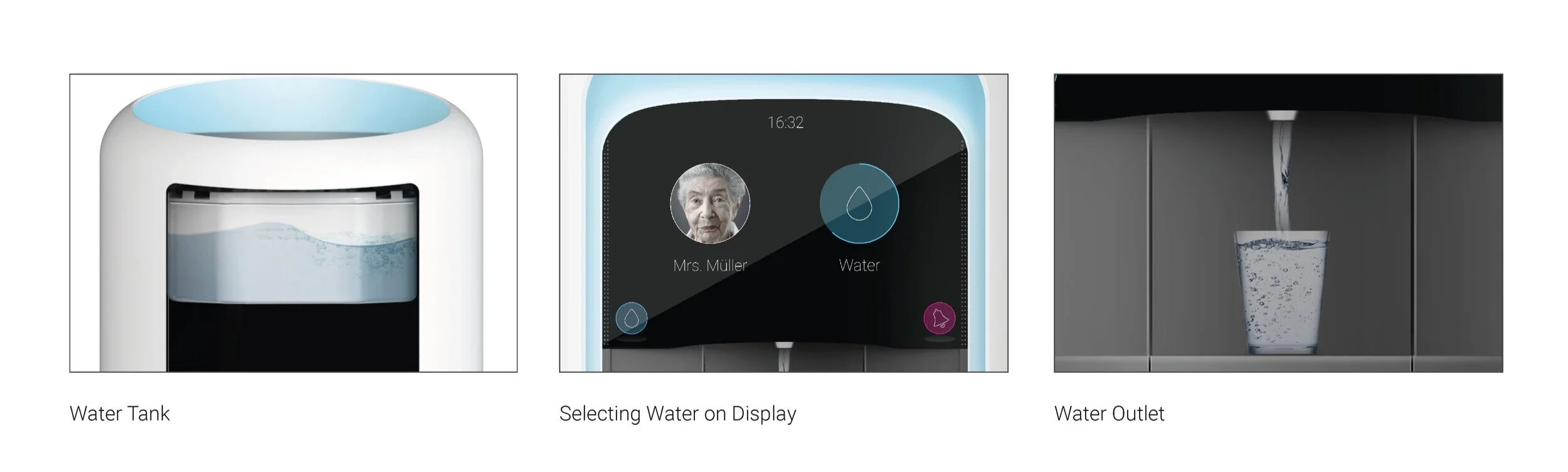
The handing out area
Either the opening is closed if someone places their own glass under the water outlet, or the middle of the opening is opened if other drinks or snacks are served. During meal time food is served on trays and the whole front is opening.

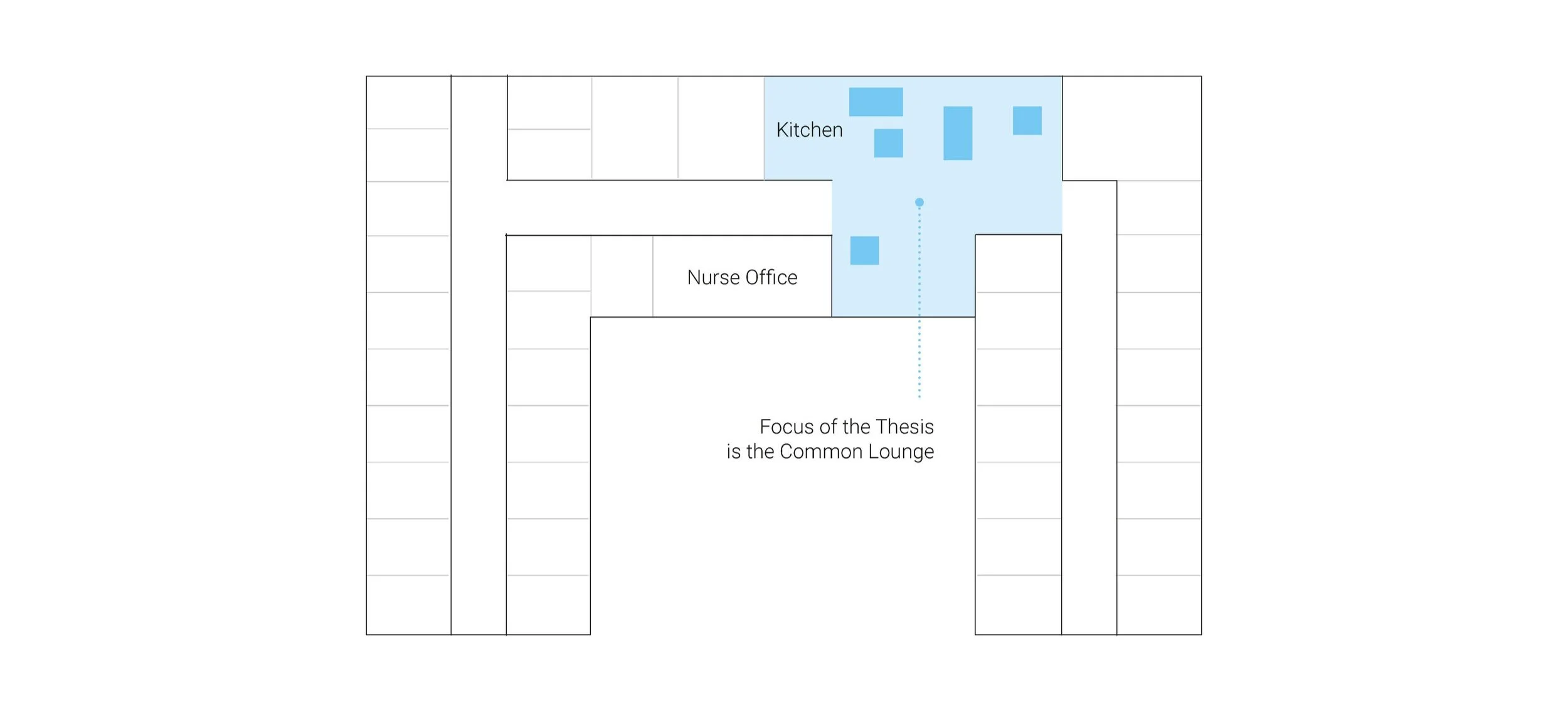
The location
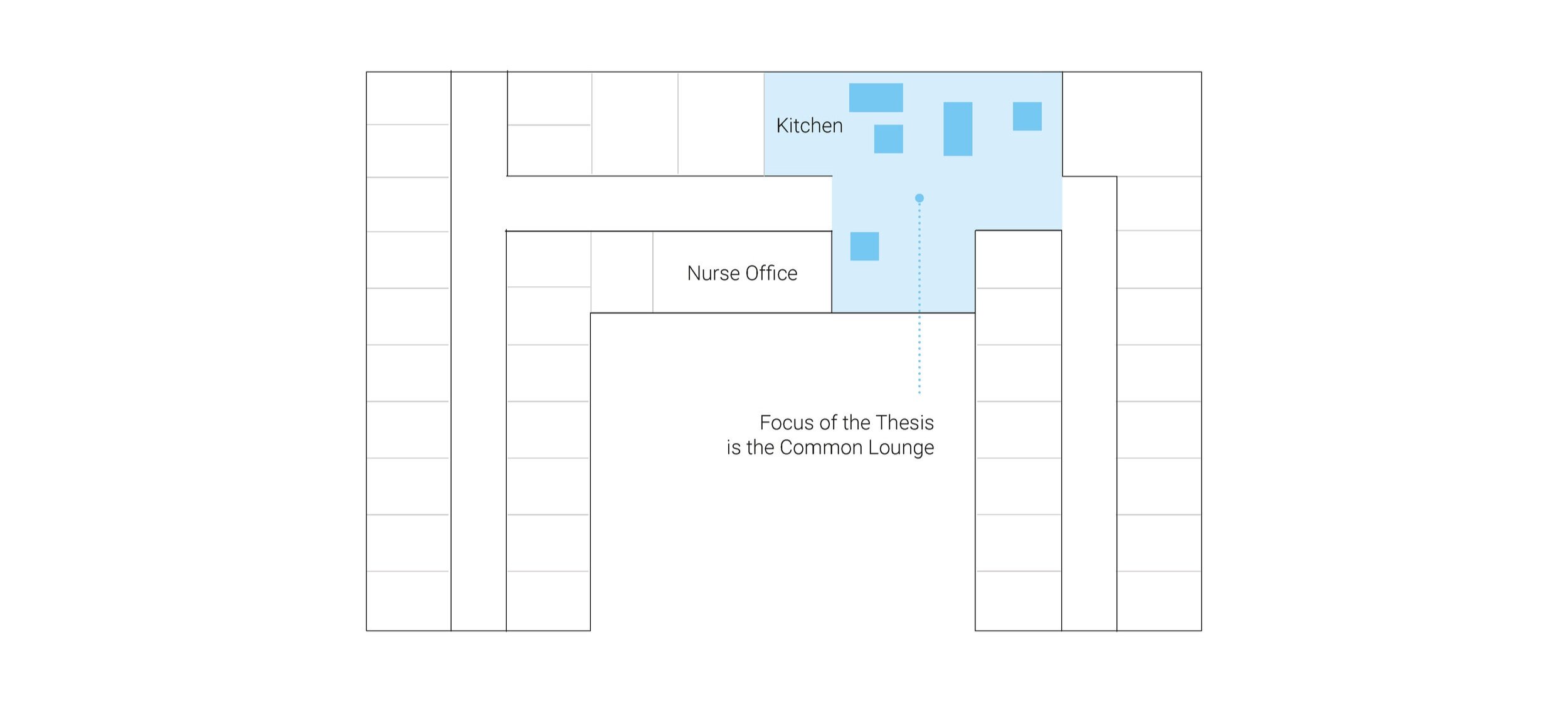
Ben currently only operates in the common lounge since this is the place where he can most efficiently serve all the residents without having to drive long distances to every single room. Besides also due to safety and hygienic reasons we decided that for the current project it would make most sense if Ben only operated in the common space.
Generally its also to assume that those residents that spend time in the common lounge are most likely still able to take a drink or a meal off the handing out area tray themselves without the support of a nurse.
The three user scenarios
Ben currently supports in three different user scenarios but more are possible in the future as technology evolves and as soon as more user tests are run and further equipment is developed.
User scenario 1
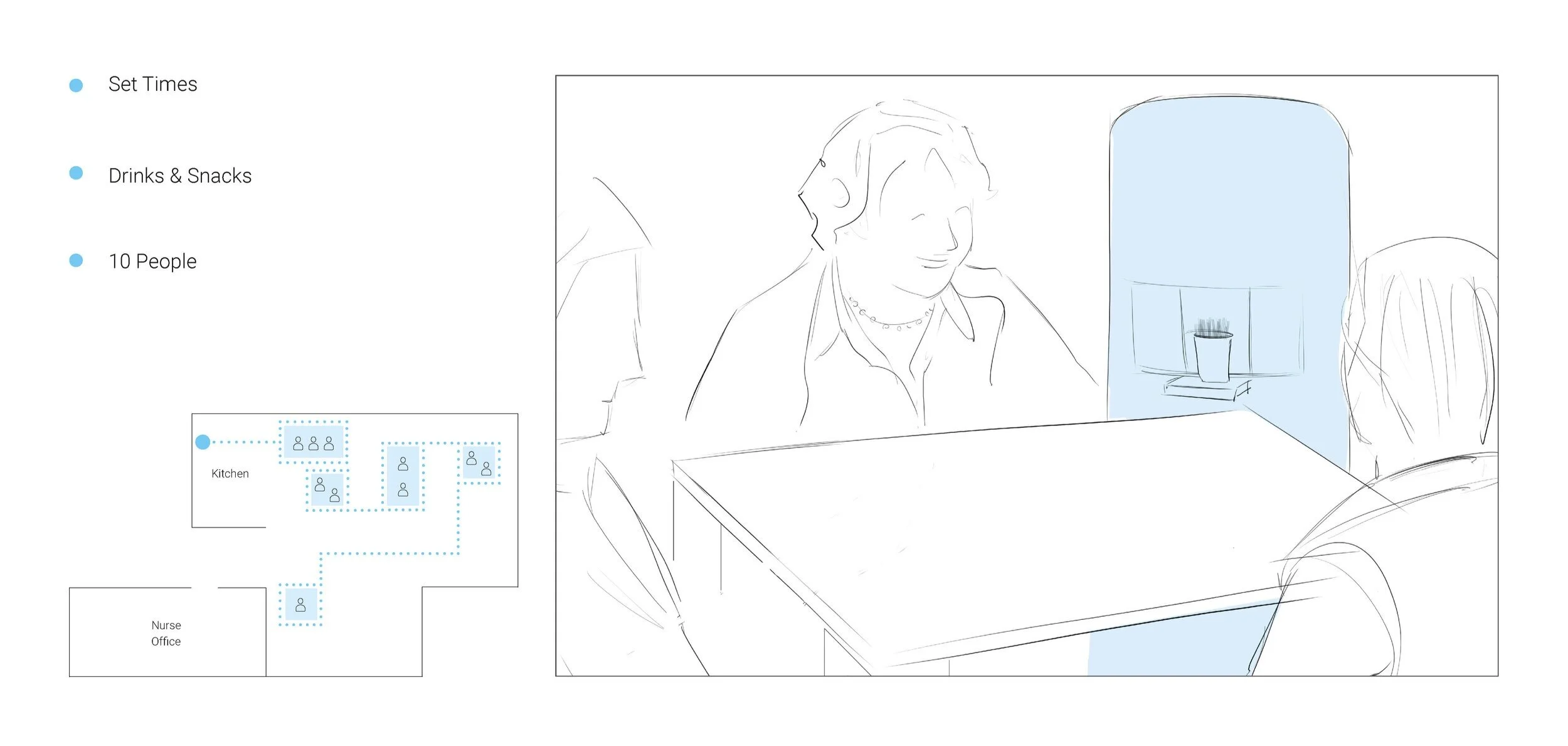
My research had shown that over 80% of the residents of the nursing home were demented and therefore in the first user scenario it was a key feature to cover that the residents were regularly reminded to drink and eat, not just during the scheduled meal times such as breakfast, lunch and dinner but also in-between.
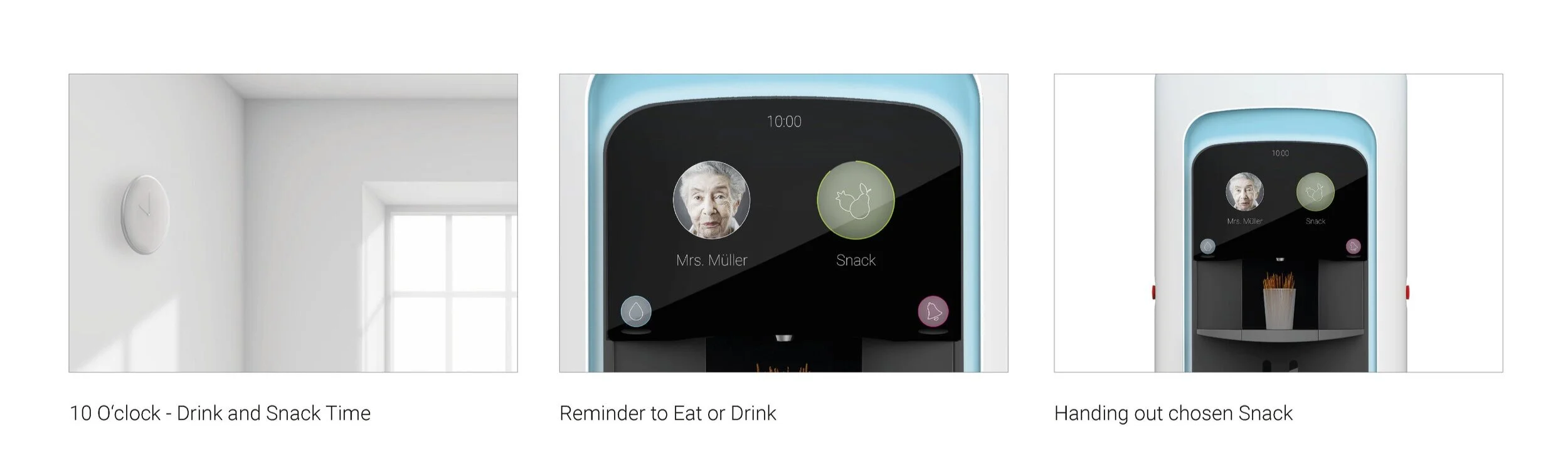

User scenario 2
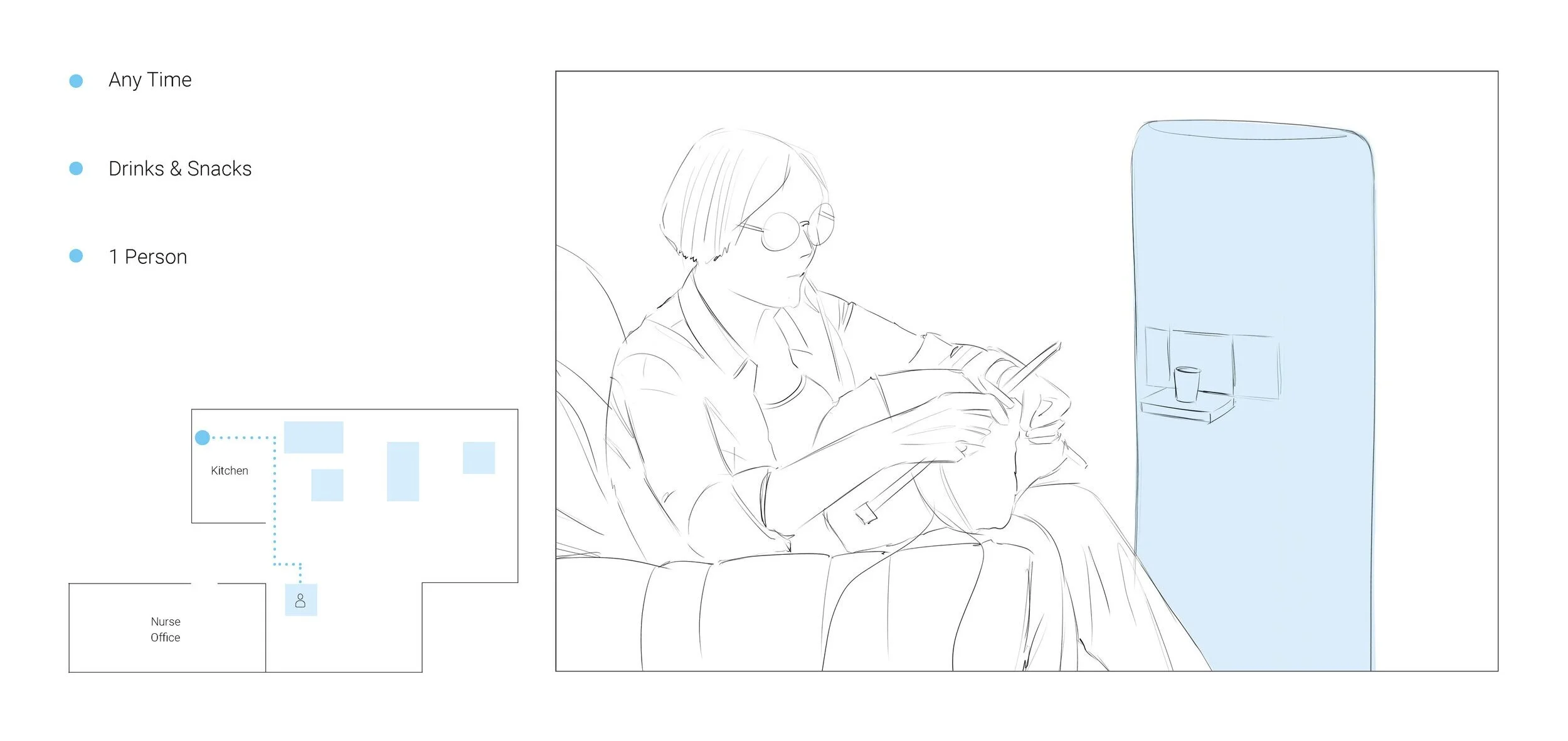
Another aspect that I had discovered that many residents have a feeling of guilt and being a burden and are hesitant to call a nurse every time they need something. At the same time I know from my very own grandparents that one of the biggest loss when they got older was their indecency. The second user scenario tries to give them back some of their independency and avoids them having to call a nurse every time they need something to drink or eat in-between. Ben fulfils spontaneous wishes and can provide a variety of different drinks and snacks in the loaded boxes.


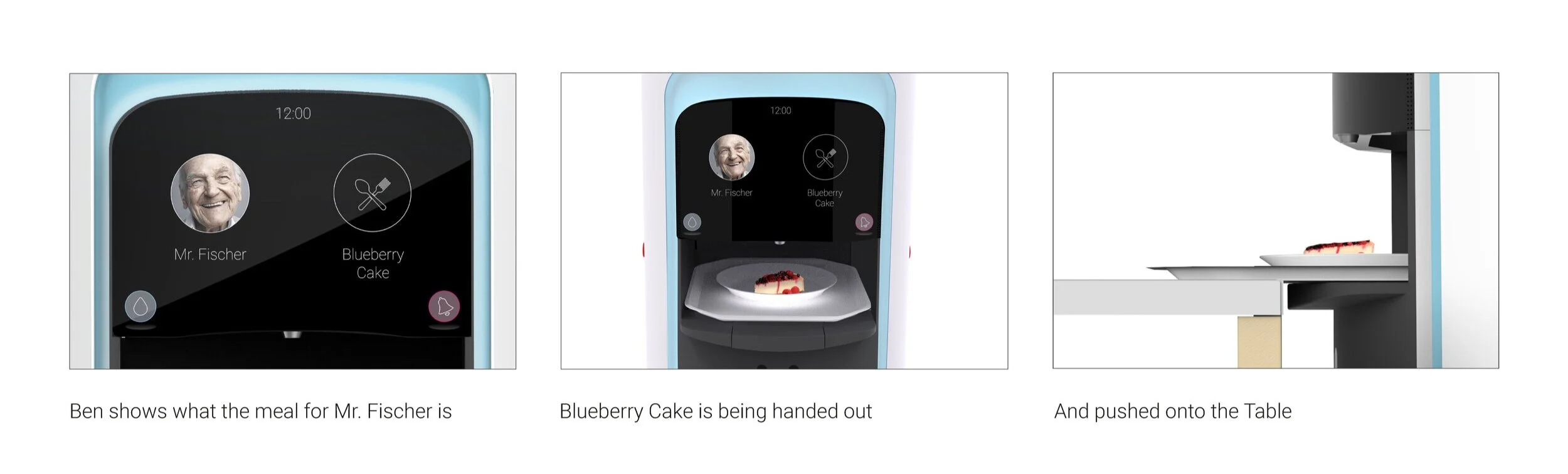
User scenario 3
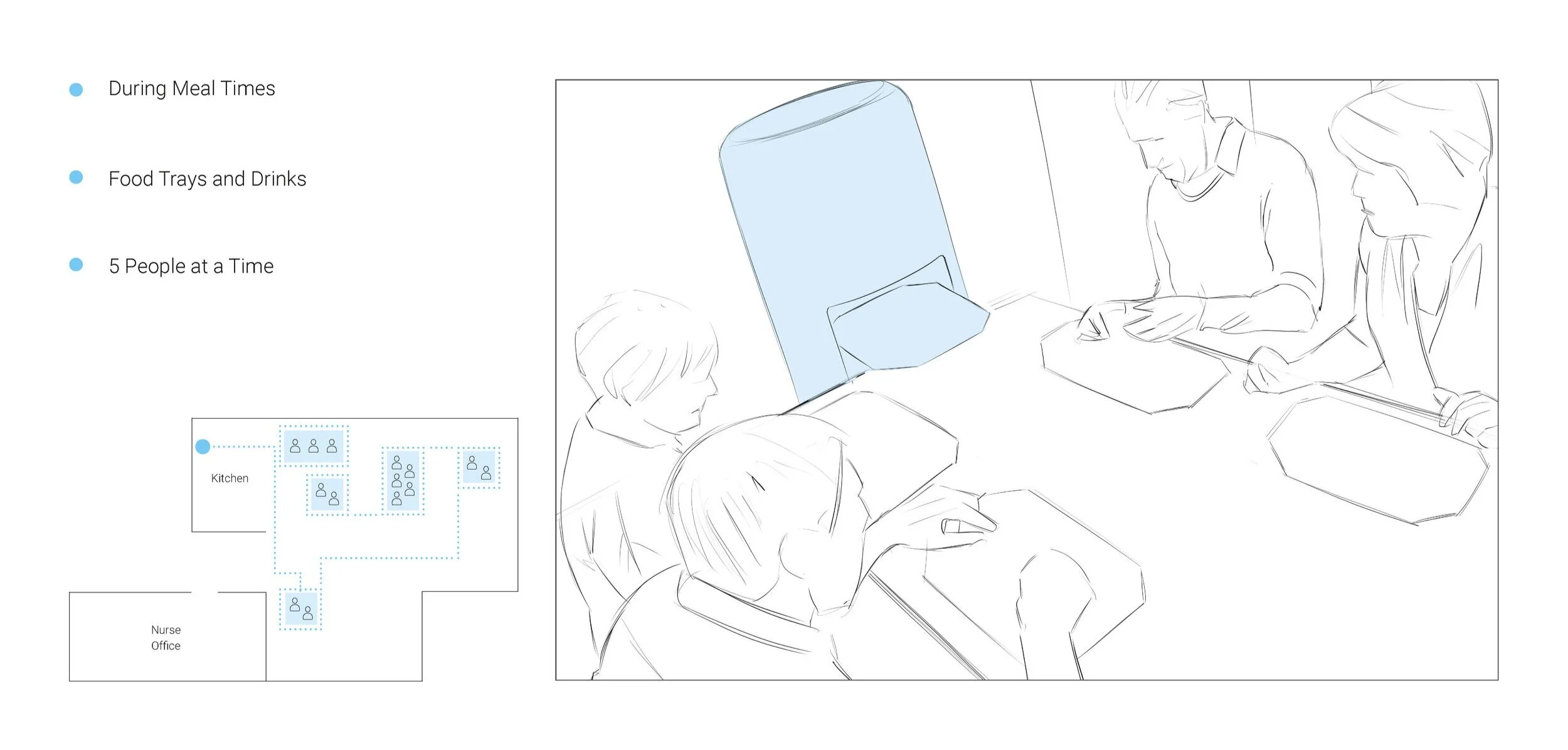
The last and third user scenario takes care of the meal servings during breakfast, lunch and dinner. I have observed that during the meal times many of the residents feel neglected and forgotten about when they do not get their meal at the same time as others. There is a great lack of staff during those busy times and the nurses or other kitchen staff can only serve a certain amount of trays at a time. Here, Ben can be of support and carry 5 trays at a time and serve them to one of the tables, while the nurses take care of another table.

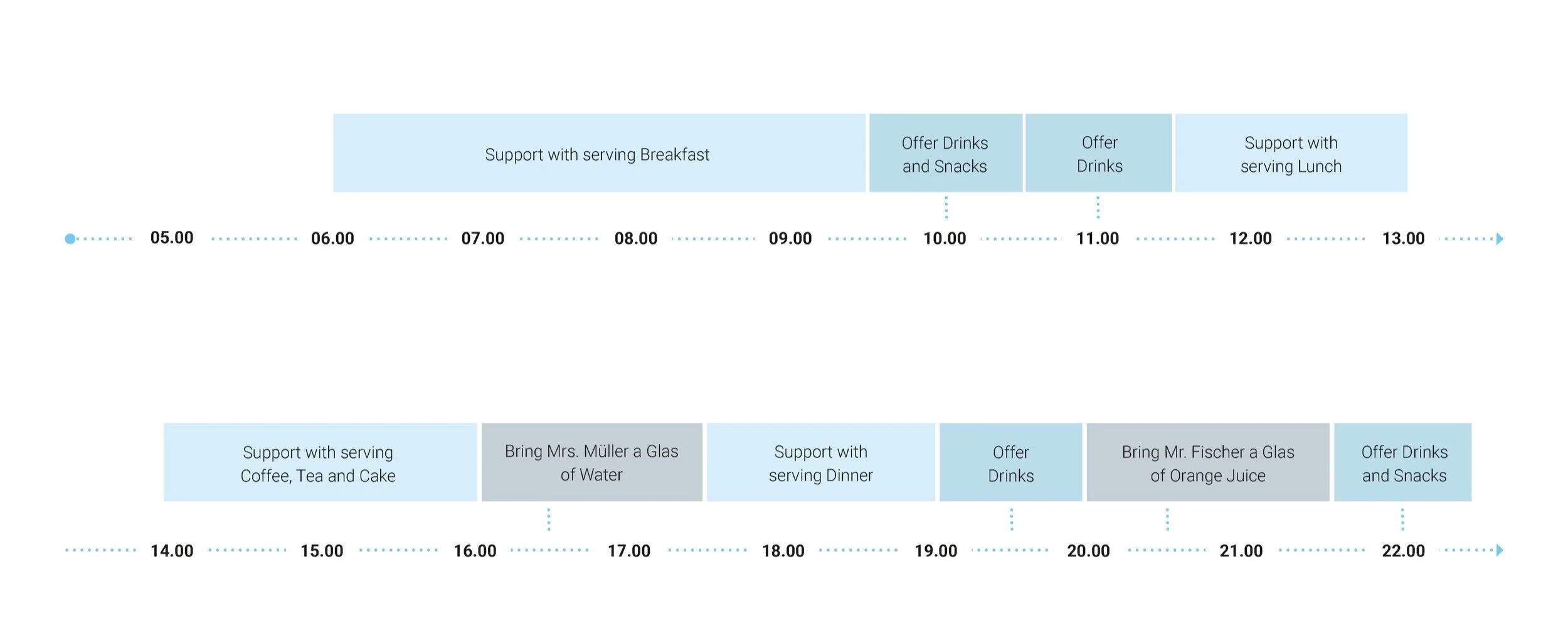
Example schedule
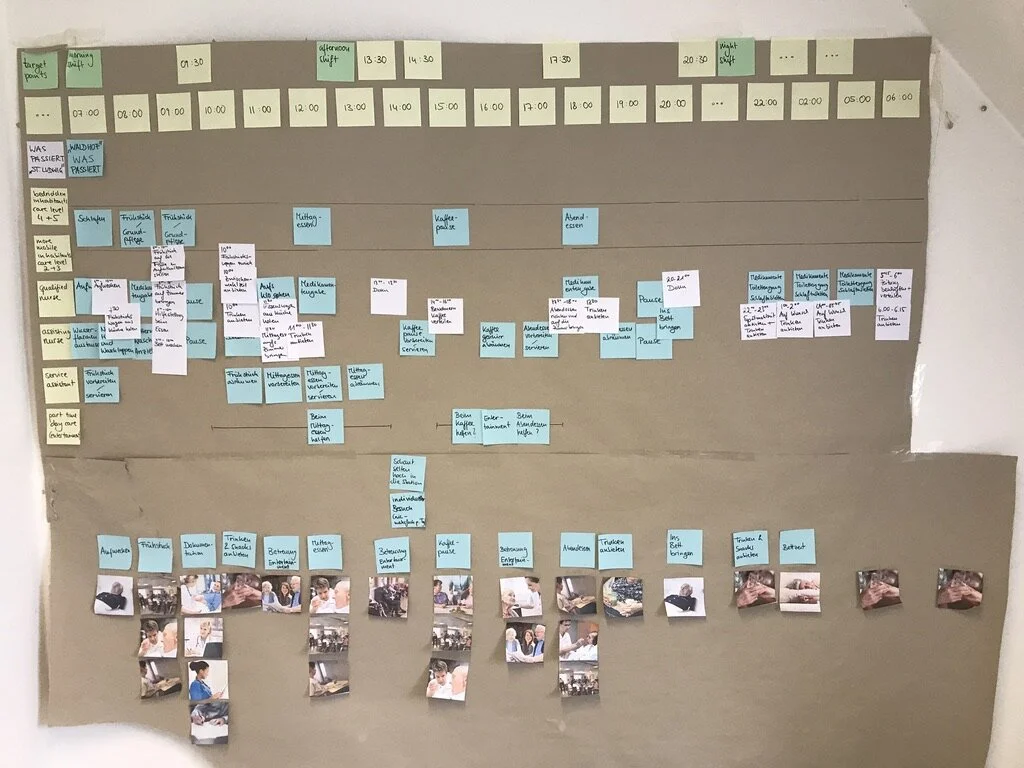
To show and implement all three user scenarios in one day I have created an example schedule on how Ben could be integrated into a daily routine in a nursing home.
Future outlook
As mentioned at the very start a user test of a build prototype of this project is currently run at nursing homes in Germany.
If I would have had more time for this project I would have enjoyed looking further into what other modular parts could be created, to load Ben with.
And finally I think it would be at least worth it to have a look further into one version of Ben with an arm to make even further interactions and user scenarios possible. As mentioned further above, currently it was not possible to implement and arm due to safety reasons.

Summary
How did I get there…
The research
During my research I took several approaches to get more familiar with the field of robotics in general and then focus more on service robotics later on. I read several books on robotics, which I found in the city library as well as the internal library of the Fraunhofer IPA Institute. I was lucky that exactly during the time of my research I was also able to attend the CEBIT, the world biggest IT Exhibition, and a lecture with discussion about robotics at Phoenix Design in Munich, the agency that designed the Care-O-Bot 4 for the Fraunhofer IPA Institute. And finally I went to the nursing homes to talk to nursing home managers, and all my users, nurses and the residents.
Visiting the “CEBIT”
My visit at the Cebit gave me a chance to have a first interaction and contact with the robotic industry, talk to experts and just do research whats out there and observe peoples reaction to it.






Visiting the design agency of Care-O-Bot 4 - Phoenix Design
During my research I had the chance to visit the Agency of the Care-O-Bot 4, Phoenix Design in Munich, Germany. Here I had the opportunity to listen to several talks and a discussion amongst experts in the robotic field including staff of the Fraunhofer IPA Institute and some designers of Phoenix Design.

Observation at the nursing home
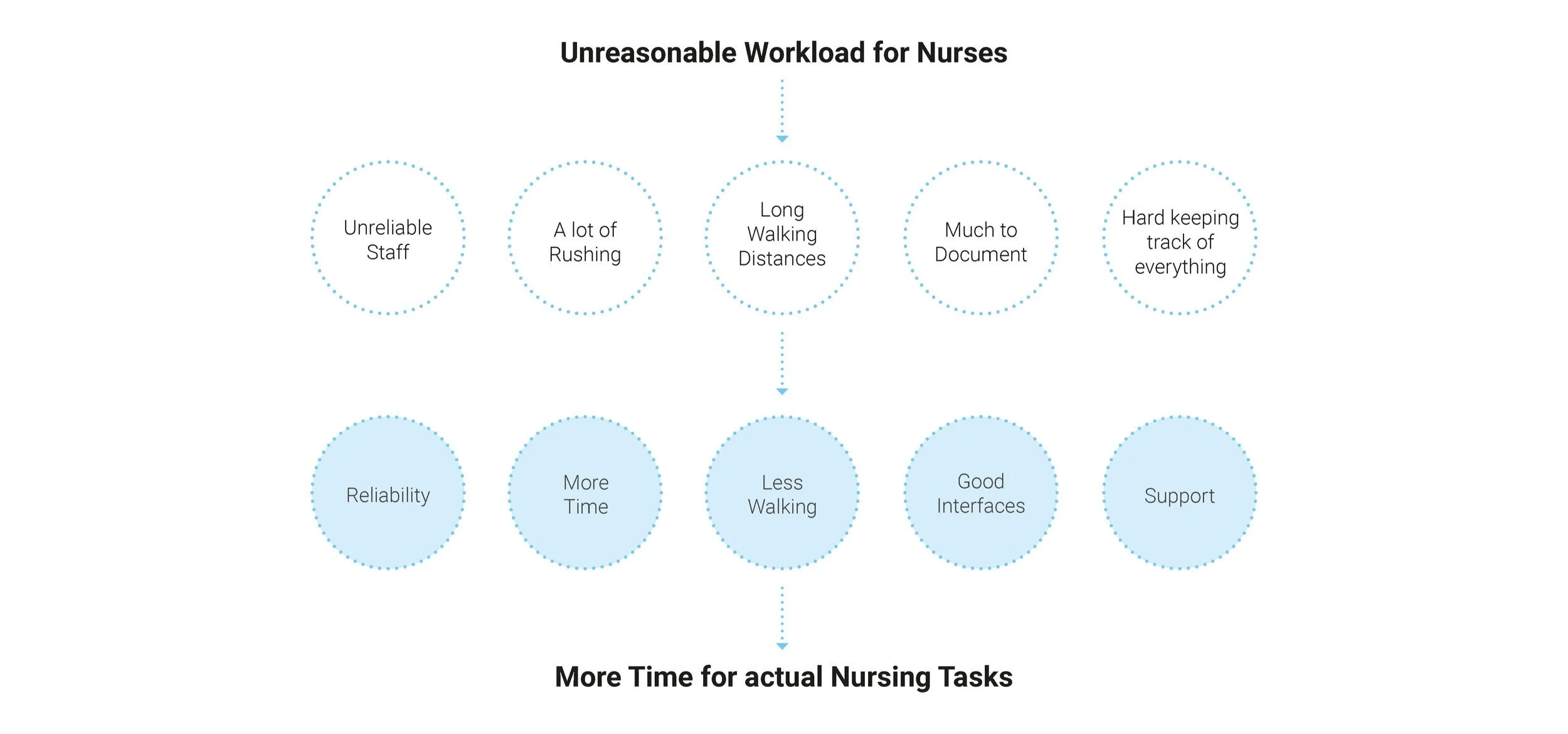
To put my visit in a nutshell for all parties that I spoke to it is very important to keep up a social interaction between nurses and the residents and provide them with a good care. There is a great desire for more time especially for the basic care in the morning and for less documentation. They all wish for more reliability on the different staff, of which some of them sometimes do not show up. They see potential in service robots as soon as they show a real benefit such as way and time saving or rising the lifequality and independence. Though they emphasize the concerns that those systems need to be fast and efficient enough to really help them with regular tasks.







Findings
After my visit I got back to my office space and tried to summarise all my findings.
Staff related
Unreliable staff
A lot of rushing around
Long walking distances
A lot of bureaucracy and documentation to do
Hard keeping track of everything such as who had how much to drink especially with those people spending a lot of time in the common areas, that are not under non stop surveillance.
Resident related
A lot of dependency on the nurses and other staff
Many of the residents eat and drink too little
All of them are of course in need of good care and good health
They feel the rushing and need to wait a lot since the nurses cannot be everywhere
Some suffer from a lack of attention
I additionally created a daily schedule to find the right moments where a service assistant could be of support.
Defining the location
One of my findings was that it was probably most reasonable that the service assistant would help in the kitchen and living room area rather than in rooms since those are the residents that need even more care and would probably not even be able to interact with a service assistant themselves anymore.
Defining the user scenarios
After all my observations, creating the schedule and including all the requirements I was given by the Fraunhofer IPA Institute, I defined three user scenarios. (more details on them in the final result section further up)
Drink and Snack Reminder
Fulfilling Individual Wishes
Supporting Meal Delivery at Set Times
The product design
Finally I went into designing the product itself.
Building on existing technology base
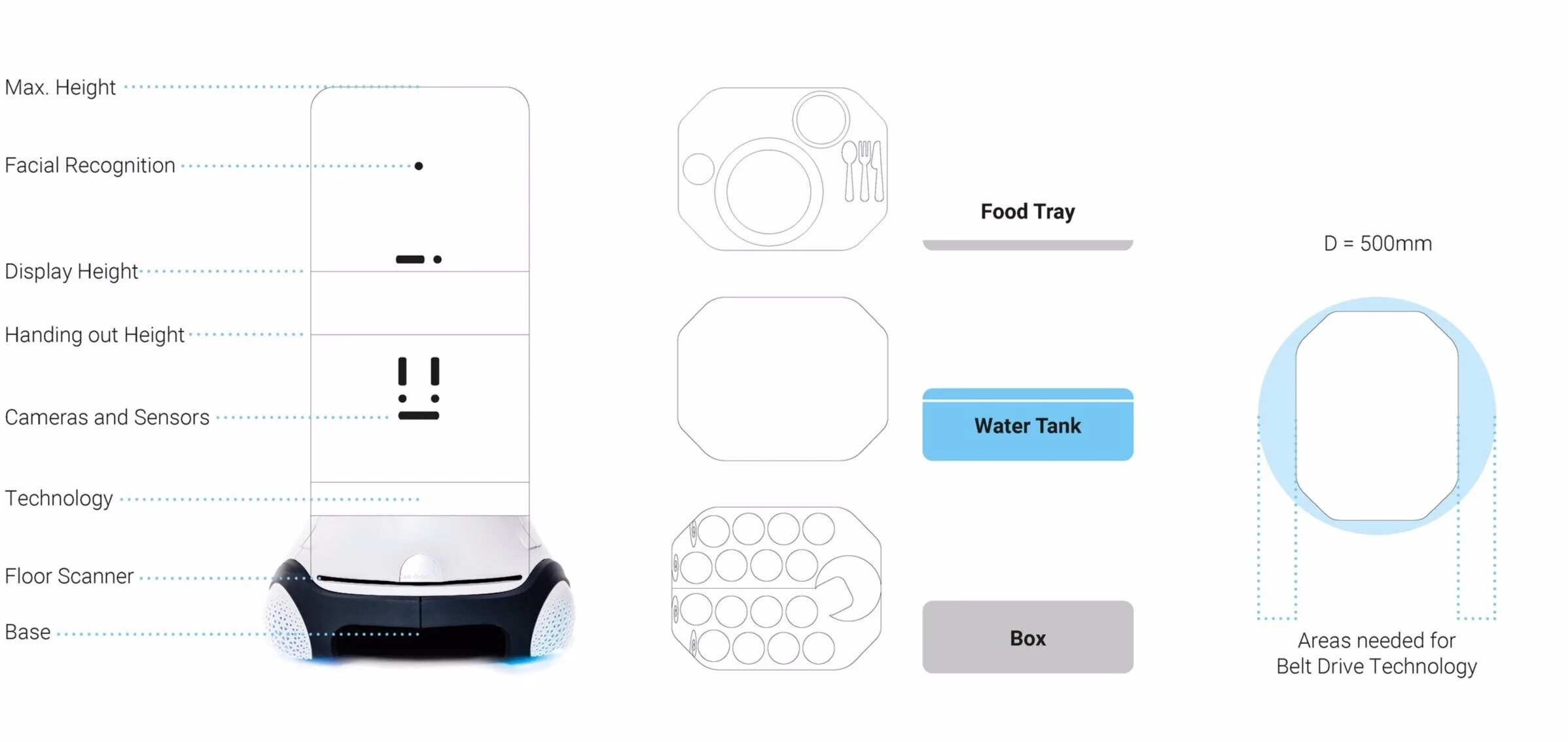
As mentioned at the very start the requirement was that I included the already existing technology of the base of the Care-O-Bot 4 and all the sensors and emergency requirements necessary for function and safety.
As show on the left is what I started off with: several sensors, two emergency buttons on each side and the technology of the base.
Low-fi prototyping
Based on that I went really fast into the first round of prototyping. I started really low-fi but went straight into real size prototypes to get a feeling for the dimensions, proportions and ergonomics.





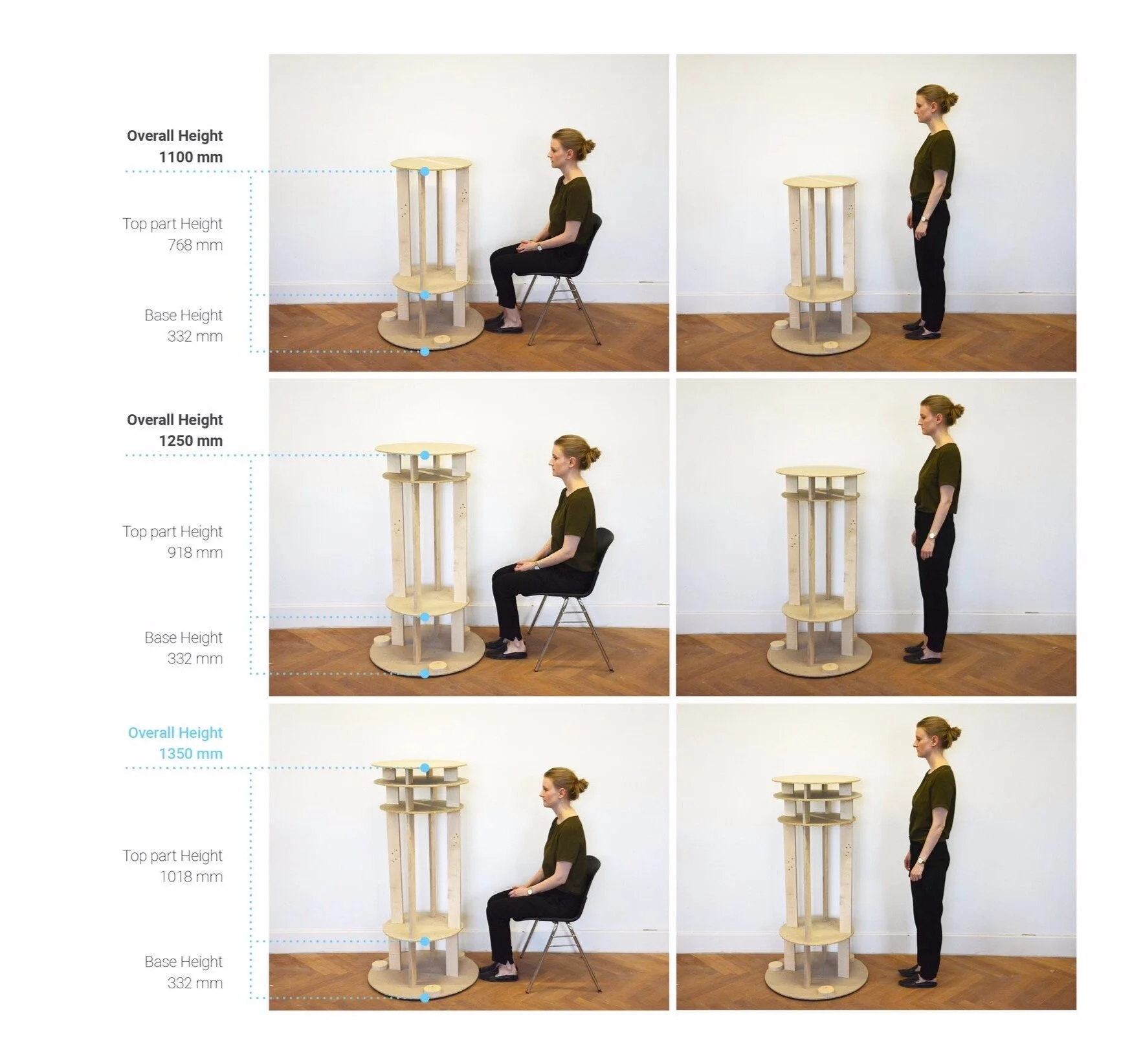
Testing ergonomics
With my first prototype I started testing the overall height I wanted to give the service assistant. To make the height testing possible I created several removable parts for the prototype that I could stack on top or remove. For me it was important when I tested the height that the user was at eye-level with the service assistant when sitting and when standing that the service assistant would never seem superior and taller than the users. The final height of the service assistant ended up being 135 cm.
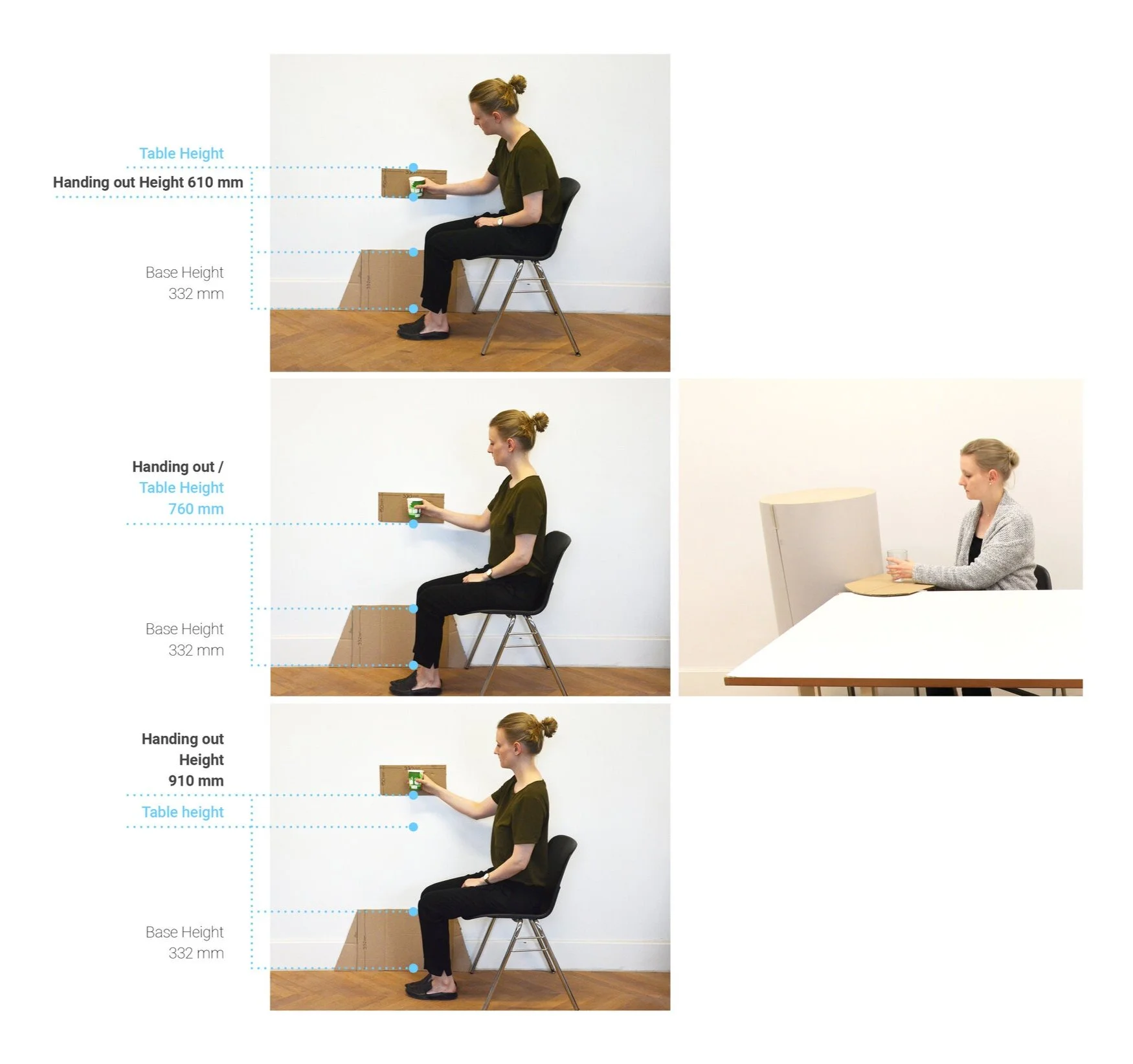
The second feature I tested was at which height the handing out of drinks, snacks and meals should take place. Testing several heights and taking all the user scenarios into consideration I decided that the handing out height should be at 760mm, which is also equal to the height of many normed tables.
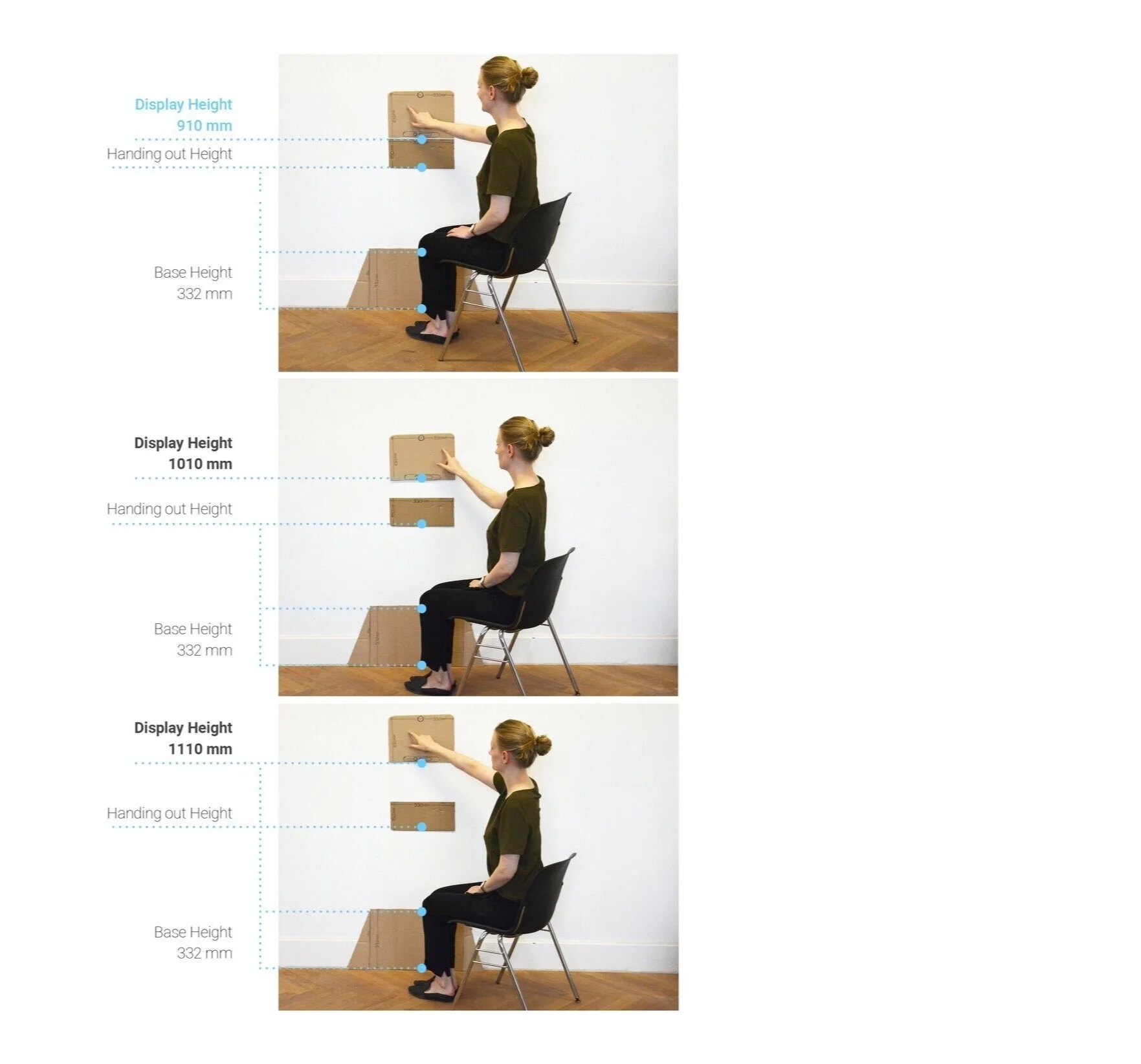
Finally I tested where the Screen to Interact with should be placed. Here I had to take the height of the handing out area and several sensors implemented in the screen area into consideration. Finally the height of the display was at 910mm.
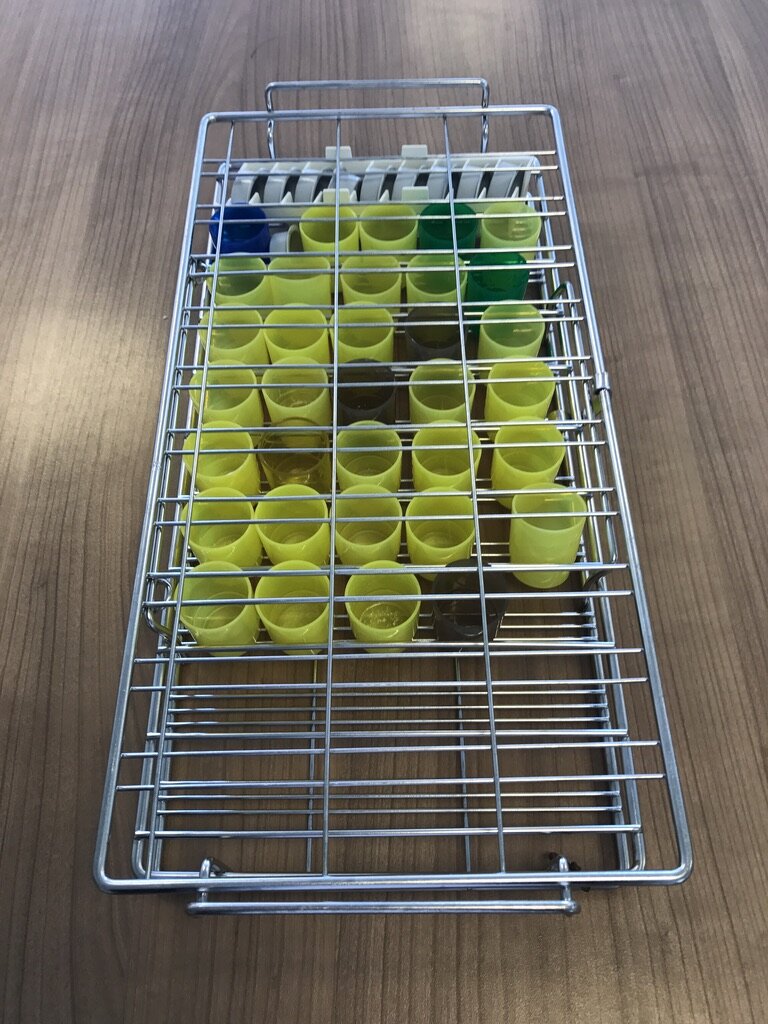
Define the content based on normed objects
After I had solved all the ergonomic related questions I started to define what the content, which could be loaded into the service assistant could be.
I also looked at how the services assistant could be differently loaded based on different scenarios and day times.
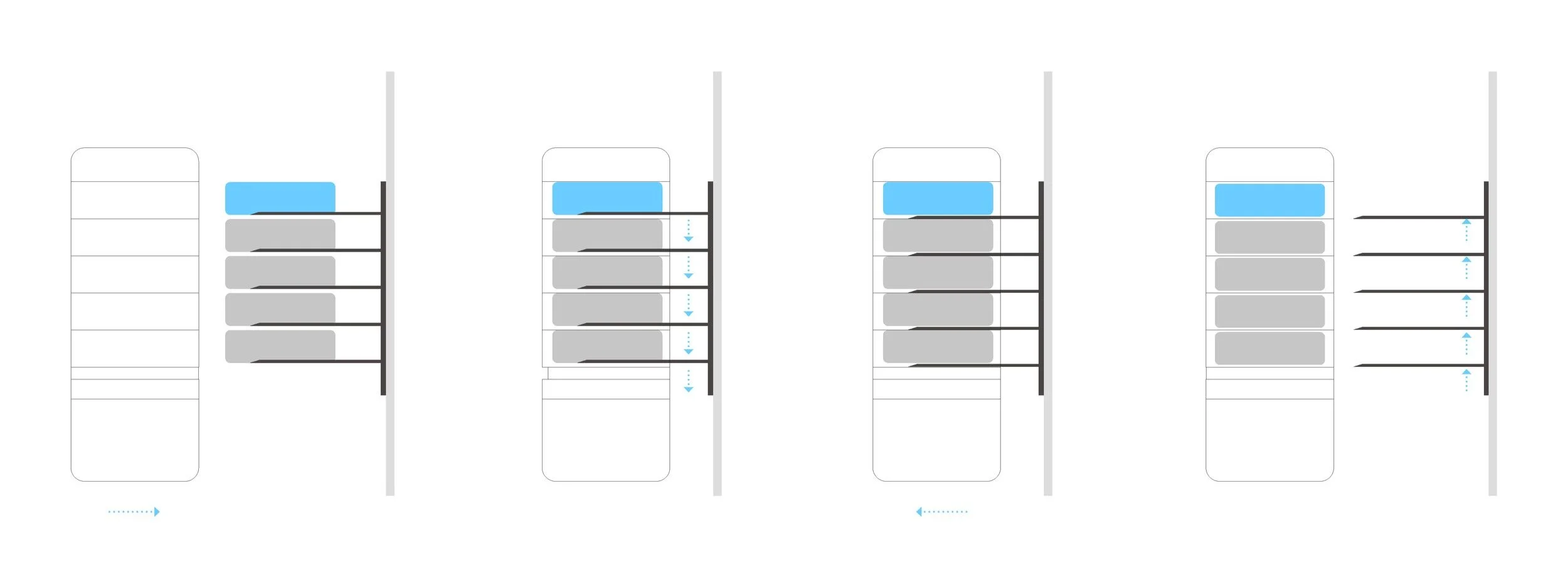
And finally I briefly thought about a wall installation on how the service assistant could be charged and (un-)load itself. The wall element would have to be stocked by the staff.
Mood board
As soon as all the features and elements where defined I started looking into the form and characteristics I wanted to give the service assistant the first thing was that I created a moodpboard, with the characteristics of: friendly, symmetric, round, integrated, organic and contrast.

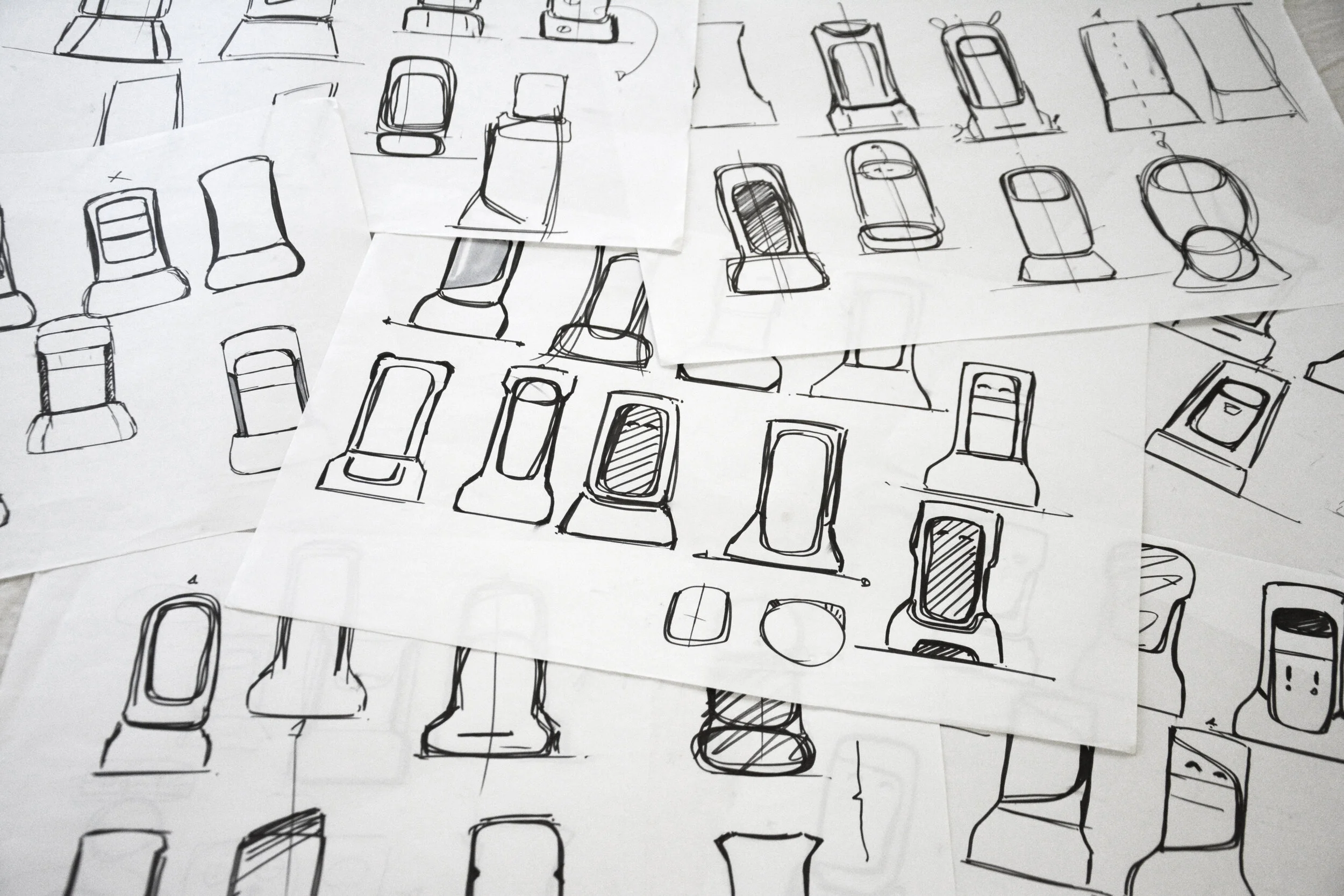
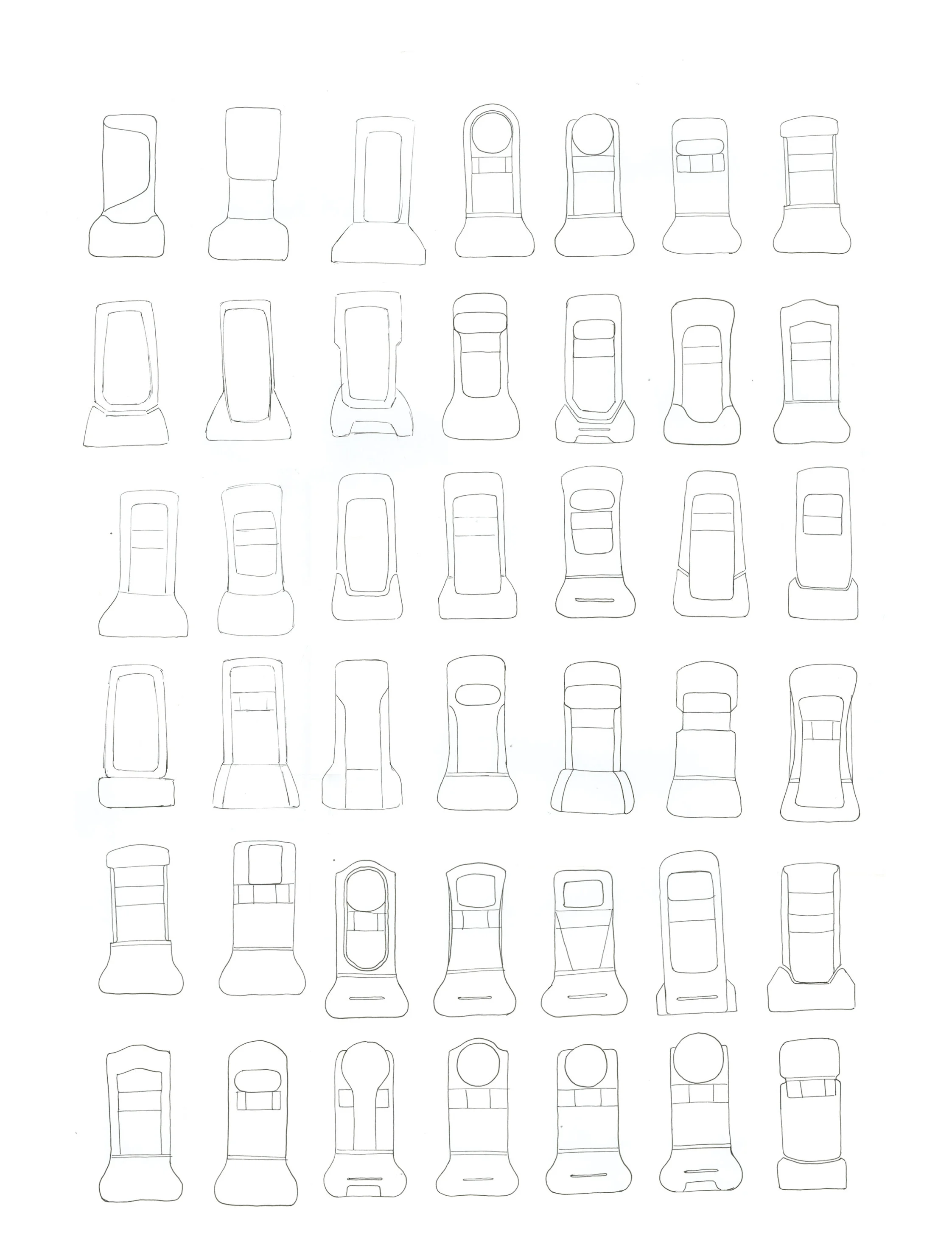
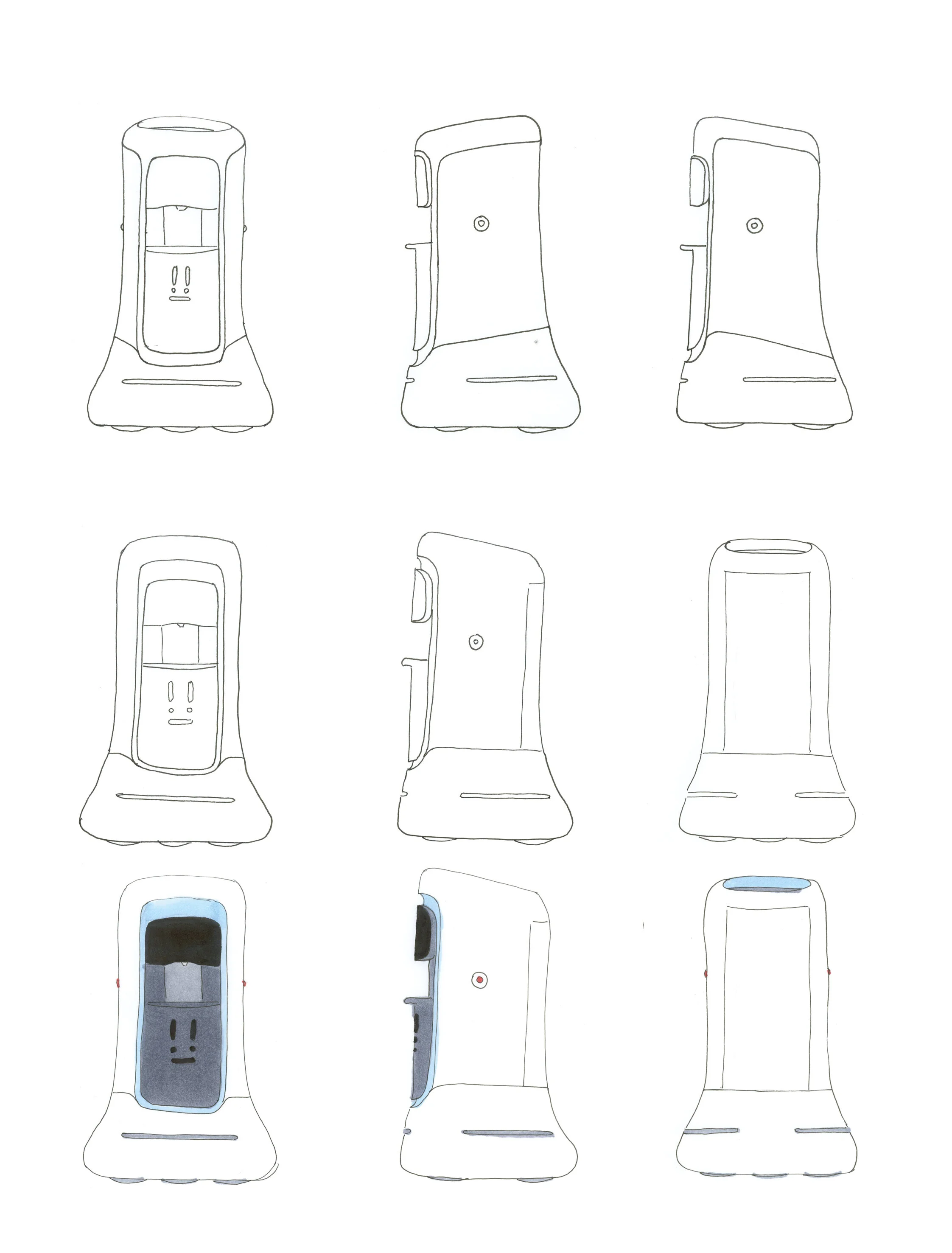
Sketching
I did a few days of sketching to discover different shapes and characteristics before I went into CAD.
CAD and final model building
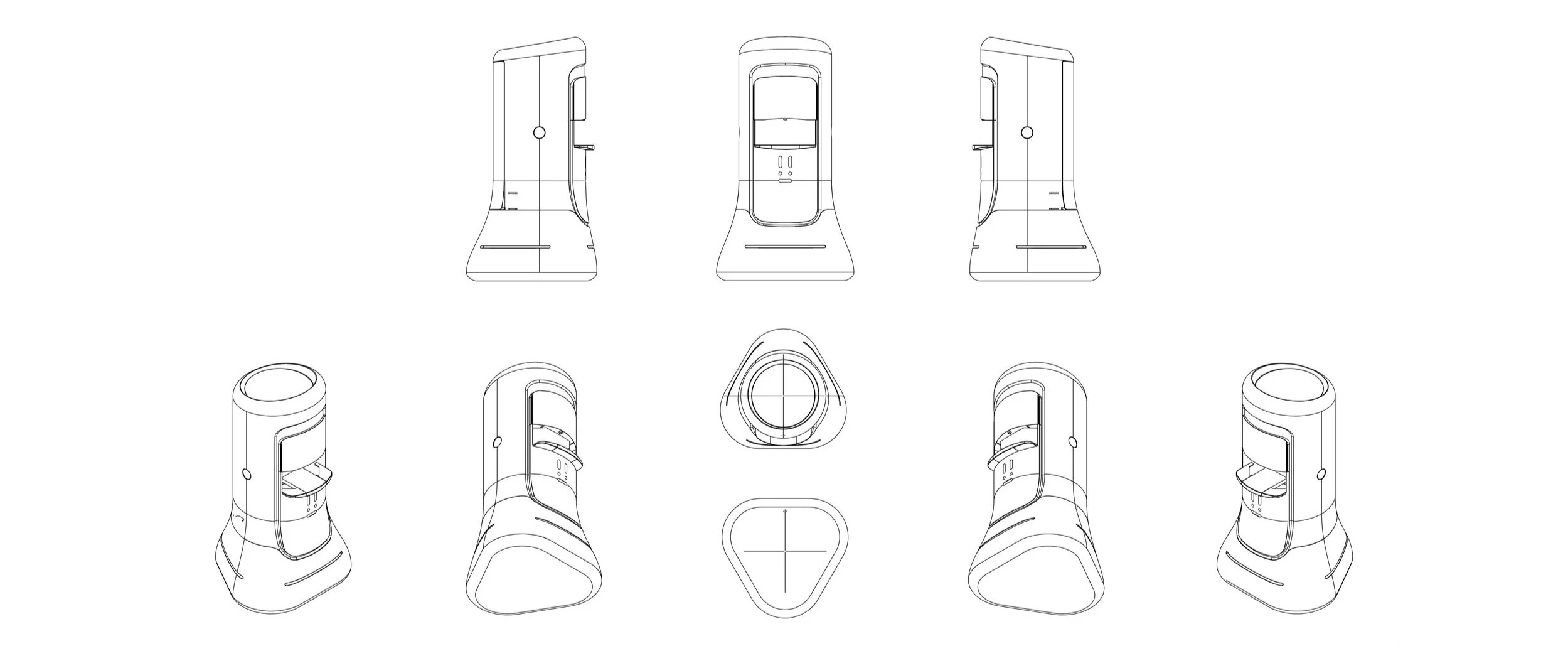
After having done the CAD model I was lucky that my model was generously sponsored by the Fraunhofer IPA Institute and I was able to hand over the milling and spray painting part to a professional model builder. The model is now exhibited at the Fraunhofer IPA office in Stuttgart, Germany amongst other prototypes of other projects.





The colour choice
Regarding the colour choice I wanted to make the robot seem weightless, soft, not threatening and also the topic of hygiene was a big one during my research, which made me overall choose white for the main body of the robot. The anthracite front I chose, to not make the many necessary sensors on the front so visible, and provide a space, frame for the screen and the opening out of which the food will be served.
The blue highlights I have added to create some contrast to all the white and grey, to make the whole product a bit more friendly.
Final model






Final exhibition
At my final exhibition of my thesis I showcased a poster with a brief description sponsored by PRADE Media, an iPad with all the Screen Interactions possible, my printed thesis, Postcards with a brief description, the 3D model of Ben in a smaller scale and a 1:1 2D printed version in the very front.

What happened since I have finished my thesis project?
After my thesis project was completed I was informed that another design student continued working on further details of the design during his internship.
I want to mention that I was not further included in any design processes and I am slightly disappointed by the outcome and final design of the currently running prototype. I would have been really curious to know more, what the changes where based on, if it was based on production difficulties or the design chances of the student that worked on it afterwards.

© Fraunhofer IPA

© Fraunhofer IPA

© Fraunhofer IPA
Also the currently running prototype made it into the German Television in a Series about “Paradise or Robocalypse”. The Video is only available until 15.04.2020.
And onto the website of the Fraunhofer IPA Institute and their youtube channel.
Personal reflection and what I have learned
I chose this project despite slightly being in conflict if I did or did not supported robotics in the field of nursing and around elderly people. Therefore I saw it as a challenge to find out what I would be thinking of it afterwards.
My main goal finishing up my bachelor studies was, to learn how to work with a realistic brief from the industry, since most of my projects during the bachelor studies were more conceptual rather than actually something that was going to end up as a real and functioning prototype. Working for the research industry taught me that money, norms and technology can and will most likely always bring certain restrictions to the design process and final outcome.
Working as the only designer on this project I have learned how important but at the same time difficult it can be to properly communicate with the engineers, the model builder and other involved parties and find common ground.
This being my first single project without a design team around me also showed me that I am definitely stronger as an individual on a team, where all the team members can complement each other and exchange as well as iterate together rather than only working with my own thoughts.